

Je vous présente aujourd'hui ma modification réalisée avec environ 80% du set originel (le 20% consistent à l'ajouts de quelques panels et bien-sûr l'EV3)
Suite à l'expo de la Rochelle où je présente le fameux Mindcub3r de David Gilday afin de présenter une autre vision du LEGO dans ces expos à ""petites"" échelles. Il m'est venu l'idée loin d'être unique de faire un véhicule autonome avec dans la finalité du projet 3 modes :
-Autonome via capteur ultrasons (remplacé par un infrarouge en attendant d'en avoir un)
-Télécommandable
-Avec la télécommande en tant que balise (semi-autonome)
Pour l'instant, seul le premier mode est complété à 90% (reste à voir sur un sol autre que la moquette parce qu'il ne tourne pas vraiment très bien car le moteur est trop faible et quelques ajustements)
Voici quelques images de la bête:
 IMG20220207175918 by Legron Chess, sur Flickr
IMG20220207175918 by Legron Chess, sur Flickr IMG20220207175851 by Legron Chess, sur Flickr
IMG20220207175851 by Legron Chess, sur Flickr IMG20220207175936 by Legron Chess, sur Flickr
IMG20220207175936 by Legron Chess, sur Flickr IMG20220207175955 by Legron Chess, sur Flickr
IMG20220207175955 by Legron Chess, sur Flickr IMG20220207180021 by Legron Chess, sur Flickr
IMG20220207180021 by Legron Chess, sur FlickrEn terme mécanique, rien de révolutionnaire ou de transcendant (c'était pas le but).
La motorisation est en directe :
Moteur-Différentiel/20T-20T/Différentiel/20T-20T/Différentiel.
Cela permet de garder le moteur fictif et de conserver une bonne vitesse de déplacement à la vitesse quasi-maximale des moteurs (je vais y revenir à ce "quasi-maximale")
Les moteurs font également partie structurellement du châssis (vu leurs forme, difficile de les intégrer autrement)
La direction est quand à elle identique puisque le moteur est connecté en lieu et place de l'axe servant à actionner la direction de base.
Idem que les moteurs de la propulsion, ce dernier permet de rigidifier la cabine.
La cabine est très peu modifié. Seule la partie arrière (couchette) a été supprimée au profit du moteur. L'habitacle demeure sans modifications (il y a le volant, la planche de bord et même les sièges !) car le capteur passe pile-poil.
Je souhaitais un Mack demeurant "fidèle" au plus possible de ce que l'on peut retrouver dans le monde et compatible avec mon projet (je mettrai la photo une fois que je l'aurais retrouvée dans les limbes de Google Images... Ou pas
 ).
).Egalement, il devait utiliser un maximum de pièces du set en lui-même et je suis fiers de vous dire que je suis presque à 100% (hors EV3 évidemment). Seul 1 différentiel et quelques panels on été rajouté par soucis d'esthétisme) donc cet objectif est remplis à 100%.
Bien ! Maintenant passons au programme réalisé:
On commence avec un démarrage en son:
 Programme EVTruck3r by Legron Chess, sur Flickr
Programme EVTruck3r by Legron Chess, sur FlickrCette partie est là uniquement parce que... Parce que j'avais envie bedam !

Elle sert également à ajouter une touche de réalisme totalement inutile au possible.
Maintenant la propulsion :
 Programme EVTruck3r by Legron Chess, sur Flickr
Programme EVTruck3r by Legron Chess, sur FlickrIl se lance après que le chrono soit rendu à 12s (en gros un décompte le temps que la partie inutile ait finie)
La propulsion passe par une phase d'accélération:
Les moteurs démarrent à 50% puis 65% et enfin 80%. Pourquoi 80% me direz-vous ? Et bien si vous vous souvenez de début, j'ai dis qu'ils étaient quasiment au maximum de leur vitesse. La réponse se trouve donc ici. Les moteurs (même si les roues sont dans le vide) se bloquent à 82% (environ) de leur vitesse maximale. Peut importe si vous mettez 100%, 120% ou encore 200%, ils restent à 80%. Il doit y avoir une sorte de verrouillage afin de protéger ces derniers.
Bien, il avance mais que faire quand un obstacle est détecté ?
Et bien il ralenti dans un premier temps, il descend donc de 15% toutes les 0.5s, puis recule pendant 5s (le rayon de braquage est large) puis s'arrête pendant 1s et enfin accélère de 15% toutes les secondes.
J'ai fais cela afin de moins solliciter les moteurs (plus de couple à faible vitesse apparemment) au démarrage afin de le lancer et y rajouter une touche de réalisme.
Bien, bien, bien ! Maintenant, l'arracheur de cheveux (car je suis une quiche pour rappel
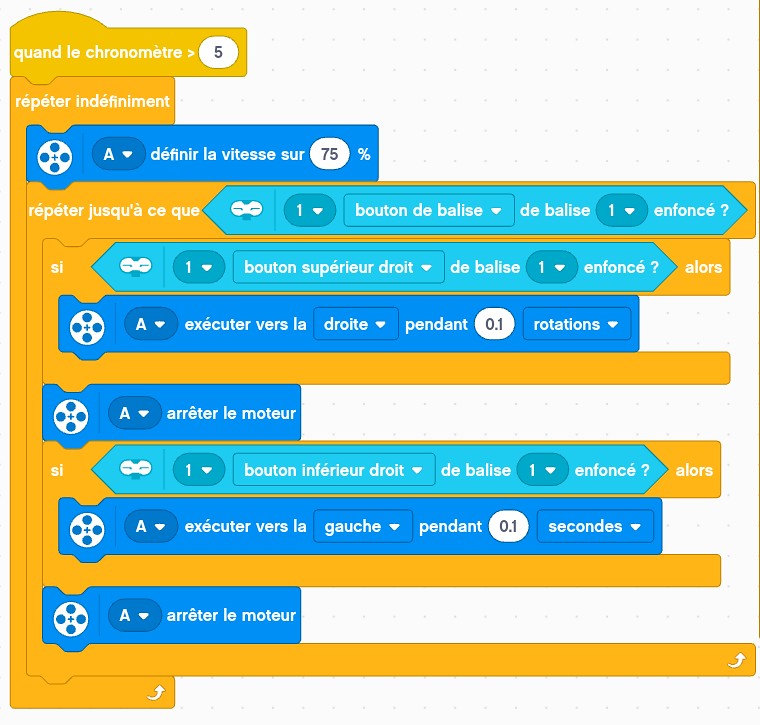
), j'ai nommé le programme de direction autonome avec retour au centre (améliorable à souhait, j'en suis sûr): Programme EVTruck3r by Legron Chess, sur Flickr
Programme EVTruck3r by Legron Chess, sur FlickrJe ne vais rentrer dans les détails (y'a pas grand chose de toute manière):
Il ne se déclenche que si le capteur infrarouge (provisoire pour rappel) passe en-dessous de 45% (soit environ 20cm devant le capot).
Suite à cela, le moteur va tourner à 10% de sa vitesse dans un sens ou dans l'autre et ce, pendant 0.5s et ne il ne doit pas dépasser -90° ou 110° (merci la direction et le jeu) afin d'éviter un déboitement de la bielle.
Et il attend 3s avant de passer au retour au centre.
La vitesse choisi n'est pas un hasard. En effet, suite à pas mal d'essais, j'ai remarqué qu'au-dessus de 10% de sa vitesse, le moteur est imprécis à 10° près et/ou il n'arrive pas à s'arrêter dans une plage donnée.
Vous avez également vu (si vous êtes attentif) que le moteur ne fait qu'aller à gauche dans un sens ou dans l'autre. Sur le coup j'ai pas compris puis j'ai fini par réfléchir et comprendre (
 ).
).Le moteur partant dans un sens ou l'autre, ses degrés sont donc positifs ou négatifs. Ainsi, dans un sens tout est logique (aller vers la gauche pour revenir à 0) mais dans l'autre... Le moteur est (en gros) à l'envers. Donc ses sens de rotations aussi pour revenir sur ses pas. C'est donc pour ça qu'il faut le faire aller à gauche pour qu'il tourne... Vers la droite ! Je rappel, il est à ce moment "à l'envers" donc la gauche devient droite et la droite, la gauche et centre y'a macron... Où je me plante et le moteur me dis un truc pas sympa

Voili voilou pour ce MOD en WIP !
Pour ceux ayant été jusqu'au bout :







 )
)



 ) mais il faudra pas ce louper lors du choix de programme, sinon c'est ch****. Donc pourquoi ne pas faire 1 programme qui va gérer les 3 ?! Mais oui Einstein ! Bien-sûr ! Tu es tellement doué pour facilité la vie une fois le machin réalisé ! Et c'est qui aime s'arracher les cheveux et qui en redemande ? C'est bibi !"
) mais il faudra pas ce louper lors du choix de programme, sinon c'est ch****. Donc pourquoi ne pas faire 1 programme qui va gérer les 3 ?! Mais oui Einstein ! Bien-sûr ! Tu es tellement doué pour facilité la vie une fois le machin réalisé ! Et c'est qui aime s'arracher les cheveux et qui en redemande ? C'est bibi !"