Je partirais sur un fonctionnement manuel sauf la rotation du rotor, c'est ce qui reste le plus démonstratif (et jouable aussi !). Donc les flexs sont une bonne idée. Et à cette échelle c’est possible. Tu peux aussi inclure une boite de vitesse commandée et avec la télécommande à variateur PF, tu peux avoir quelques choses de doux (deux vitesses + variations à la commande). Tu peux aussi faire les commandes avec des vérins en circuit fermé (tu fais passer les tuyaux ou tu veux, attention ça marche pas avec les petits vérins à cause de la compression de l'air (utiliser de l'huile ?, pas vraiment lego...).
Si tu veux le garder exposé, tu peux aussi prévoir un système que tu fixes sur le poste de pilotage (ou au rotor qu'importe) qui est en fait un double de commande. L'idée est d'actionner les commandes à bien 50cm de l'hélico, ce qui est quant même plus pratique quand le rotor tourne (tout en gardant les contrôles dans l'habitacle pour le réalisme). Tu peux regarder pour des flex mais ils sont pas assez long (plusieurs en série ?), des axes ou des vérins montés en circuit fermé (pas mal : tu aurais qu'un gros boudin de tuyaux qui va au moc; inconvénient : faut prévoir les vérins de commandes, mais tu peux les coupler avec ceux du pilotage).
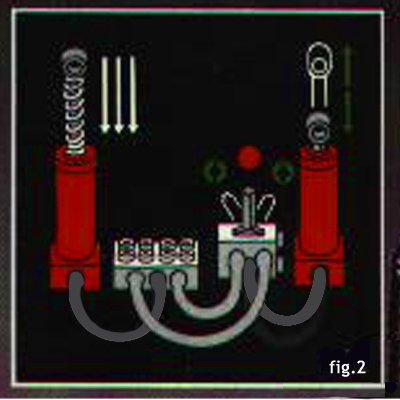
Franchement, go utiliser pneumatique, ça résoudrait pas mal tes problèmes et tu peux dupliquer les commandes avec des répartiteurs en T et des switch. Il te faudra un circuit de mise sous pression par contre (une pompe, un air tank, une valve anti-retour, et un switch, quand tu pompes ça ajoute de l'air dans le circuit fermé, quand tu ouvres le switch, tu fais la purge). Inconvénient : il risque d'avoir des décalages entre la consigne et la sortie.
Le problème majeur c'est la place, l'helico est grand mais très fin, ce qui limite la mécanique embarqué (à moins d'occuper la queue ?). Quand je vois ça :
http://www.brickshelf.com/cgi-bin/gallery.cgi?i=4690035Je me dis que ton moc est trop exceptionnel pour te permettre d'abandonner, alors courage
.gif ":)")




















 )
)
 par valve anti retour, tu penses à quoi Nico ?
par valve anti retour, tu penses à quoi Nico ?


.gif ";)")