







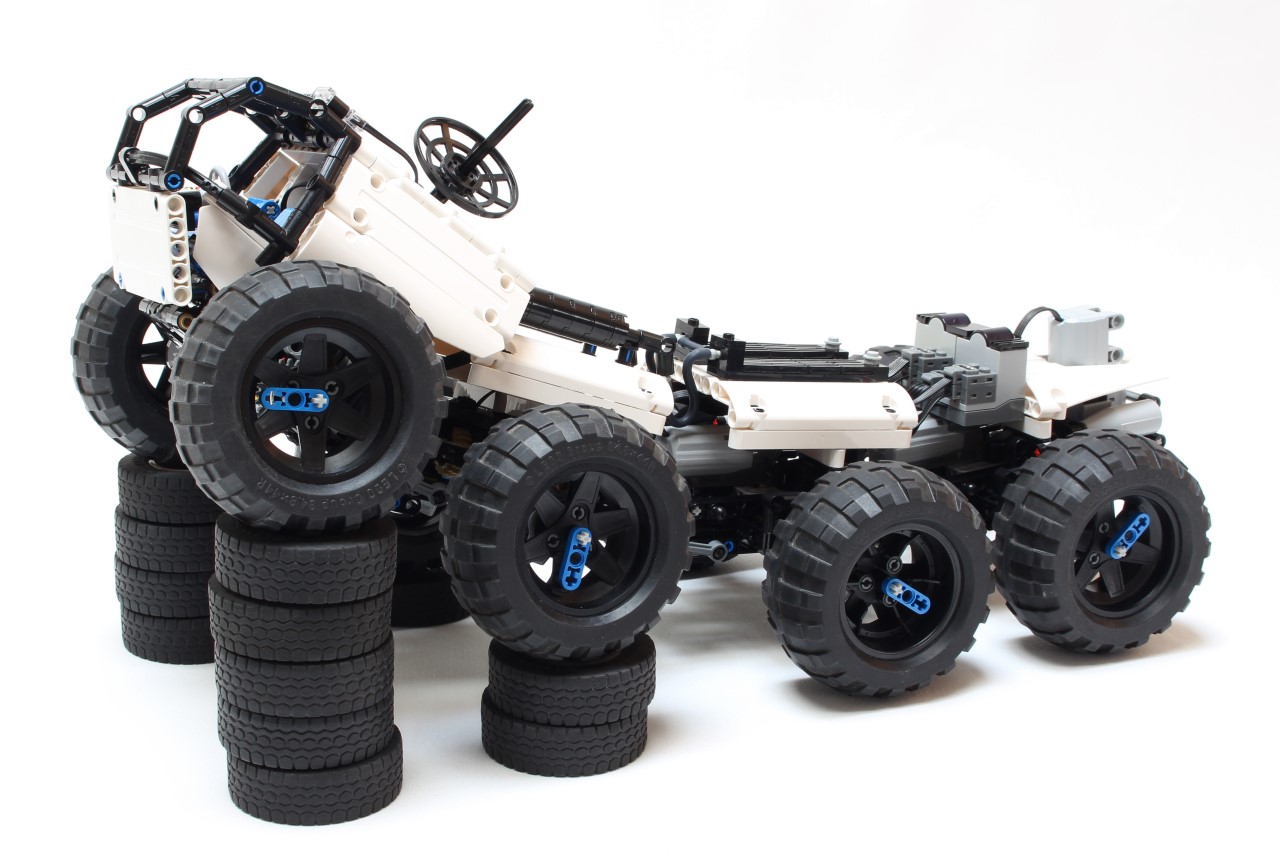
Ce curieux véhicule est donc un 8x8 c'est à dire 8 roues motrices et directrices. Le concept est simple, chaque essieux est autonome avec son propre moteur de propulsion mais pas de direction. Chaque essieu est relié à l'autre via une ball joint. Et c'est par là justement que la direction des essieux passe, à la manière du crawler lego.

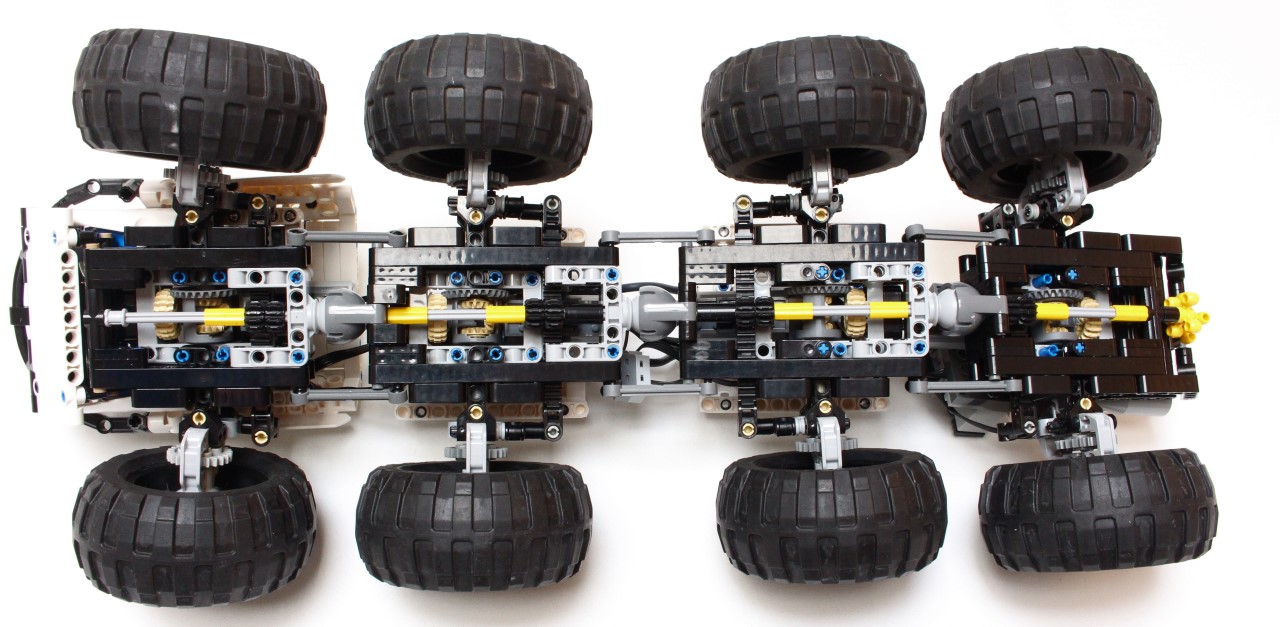
Il y a donc un moteur M pour chaque essieux avec comme reduction : 12/20 - 20/diff - 8/24. La direction se fait avec un classique servo moteur placé sur l'arrière, des pignons et crémaillère. Pour la différence de débattement pour les essieux arrières avant et centraux, j'utilise simplement des bielles de différente longueur. A la manière du 40008 ou 42009
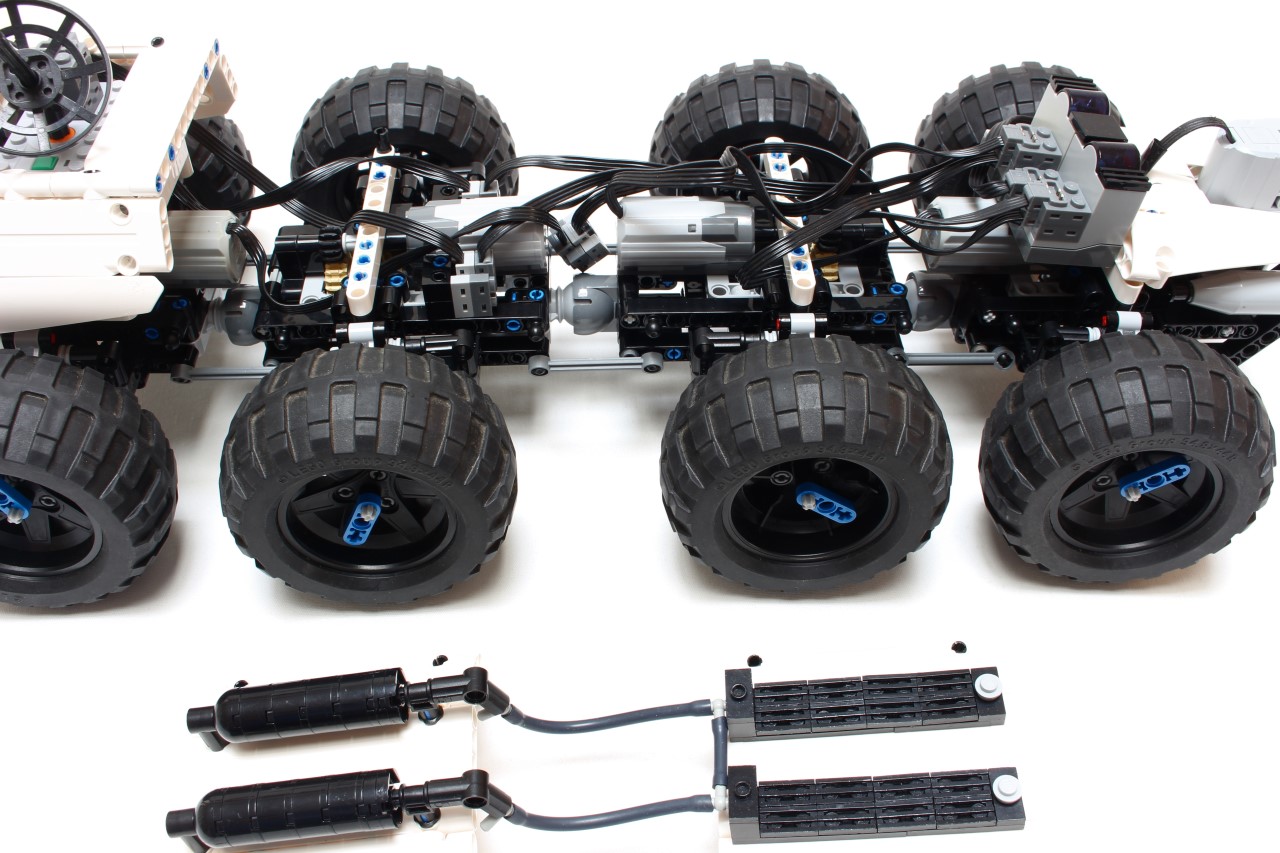
Il n'y a pas de suspension à proprement parlé mais plutot des articulations. Chaque essieu est articulé librement dans toutes les directions sauf celle de l'avancement pour évidement que les essieux restent en ligne droite et que la direction fonctionne. La construction est la même que sur le crawler lego (ball joint + deux bielles).
Au niveau électrique, j'utilise deux récepteurs infrarouge bien qu'il n'y ait que deux fonctions (propulsion et direction). Chaque IR s'occupe de deux moteurs, vu que même le récepteur V2 ne peux pas s'occuper de 4 moteur d'un coup. Le servo est fixé sur le V2 ce qui est logique.
Au niveau de design, je me suis inspiré des véhicules d'exploration de planète, comme ceux de la mars society. Le blanc s'est du coup imposé. Les essieux centraux sont carénés, avec quelques détails (radiateur, condensateur etc), l'objectif n'était clairement pas le design mais plutot le concept (bon je trouve ça joli quand même).
Au niveau des performances, elles sont bonnes ! Ils grimpent partout (sauf quand les différentiels glissent trop). Aidé par les 4 moteurs de propulsion, une vitesse et un couple correct, les articulations libres (qui se mettent parfois un peu en vrac) et la centre de gravité du coup très bas comparé à d'autre trial truck type camion sur échasse ^^ Seul petit défaut hormis le design qui reste subjectif, est au niveau de la direction, le servo étant placé à l'arrière, avec le jeu de fonctionnement, les roues avants tendent à moins tourner que celle arrière, mais ça ne pose pas de problème vu que les 8 roues tournent et donc le rayon de braquage est plutot court.
A vous !






.gif ":)")



 ?
?
.gif ";)")


{kind=link}
{kind=link}