





(Image issue de la mounière : http://mouniere.blogspot.com/2007/09/cours-et-mthodes-leon-n2-les.html )
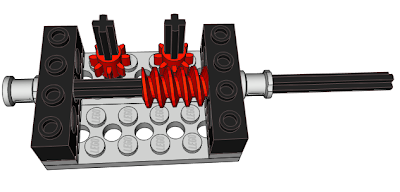
Donc je vous le présente : le moteur fait tourner la vis sans fin et en fonction du sens de rotation cela fait glisser la vis sur l'axe qui entraine l'un ou l'autre arbre de sortie.
Je l'ai utilisé dans mon robot sur chenille : Dans un sens le robot avance et dans l'autre il tourne sur lui même.
Pour cela j'ai du ajouté l'effet différentiel + roue libre (cliquet) :
- le premier arbre entraine la cage du diff qui fait avancer le robot en ligne droite.
- Le second entraine la roue gauche en marche arrière, pour que la roue droite tourne en marche avant en même temps j'ai mis un cliquet sur la cage du diff qui ne peut que tourner en avant.
ici on voit le diff et le cliquet :
http://alban.nourry.free.fr/LEGO-CREATION-070522/LEGO-CREATION-070522-Images/1.jpg
Le robot complet est ici : http://blogotechnic.blogspot.com/2007/08/johnny-5.html






.gif)
























 oui il est bien ton robot
oui il est bien ton robot{kind=link}