J'ai repris l'idée de Plastik pour les palettes qui se recouvrent, esthétiquement est moins bien mais plus fiable.
Voici le détail lors du changement de palette.
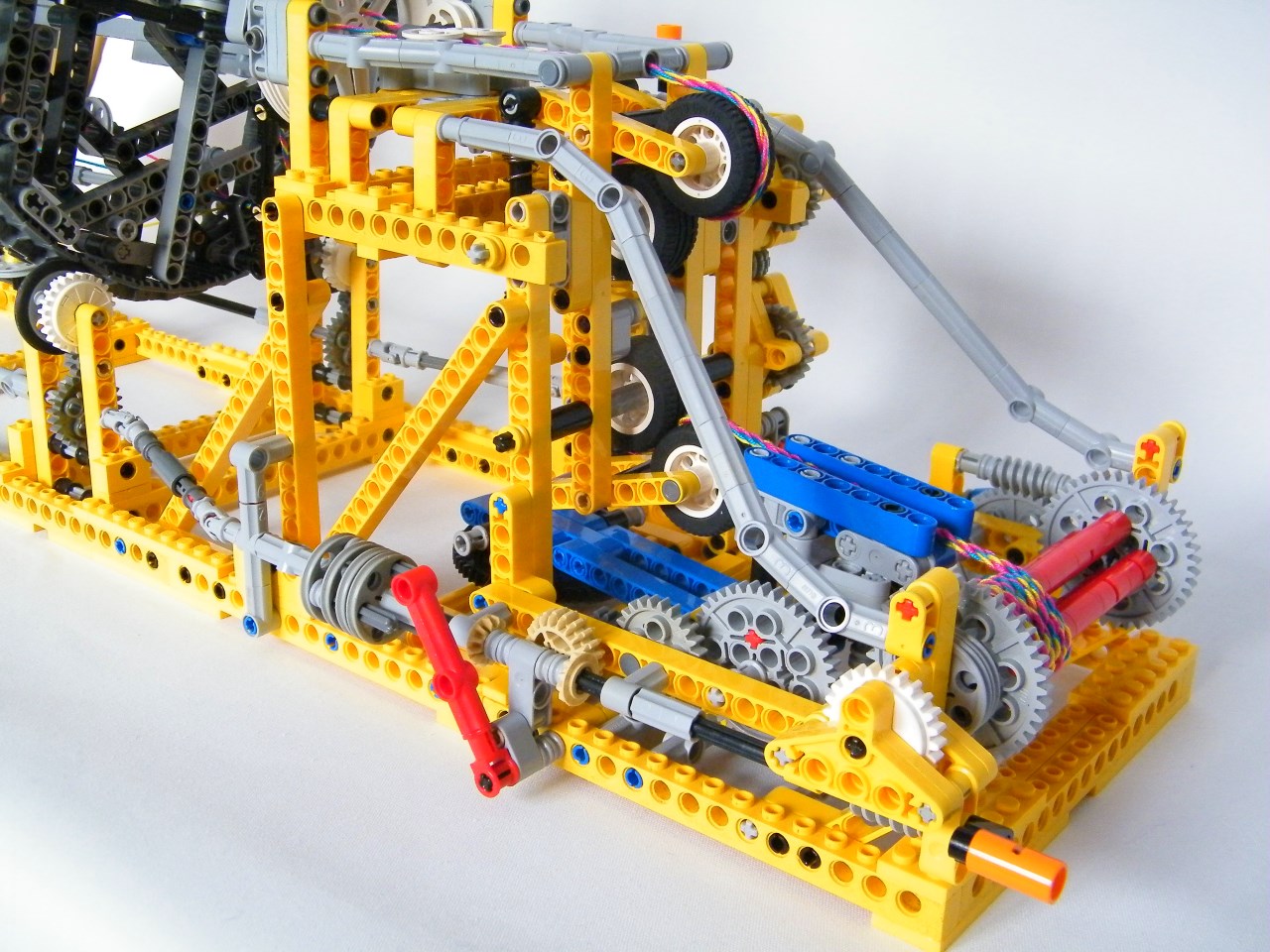
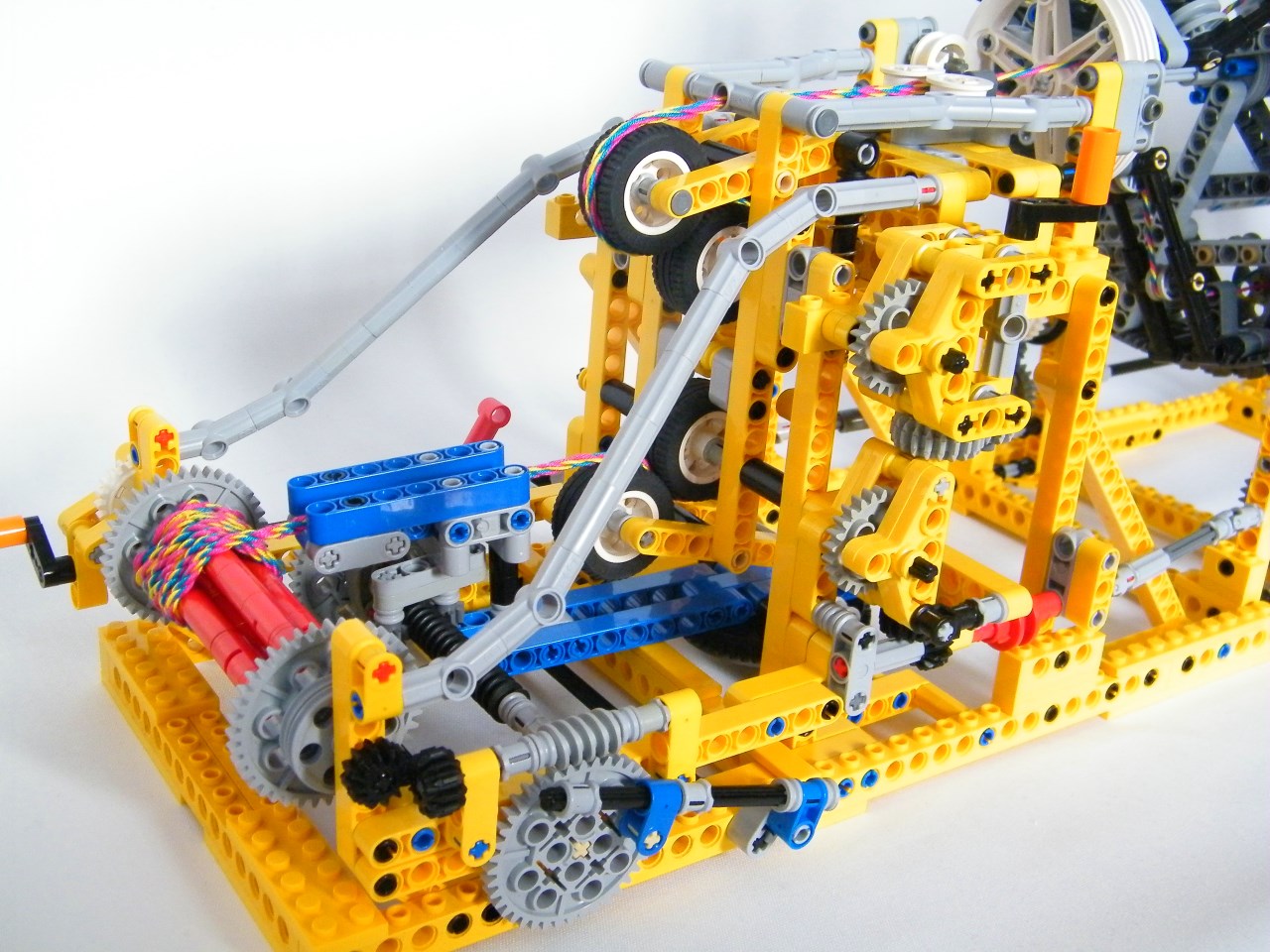
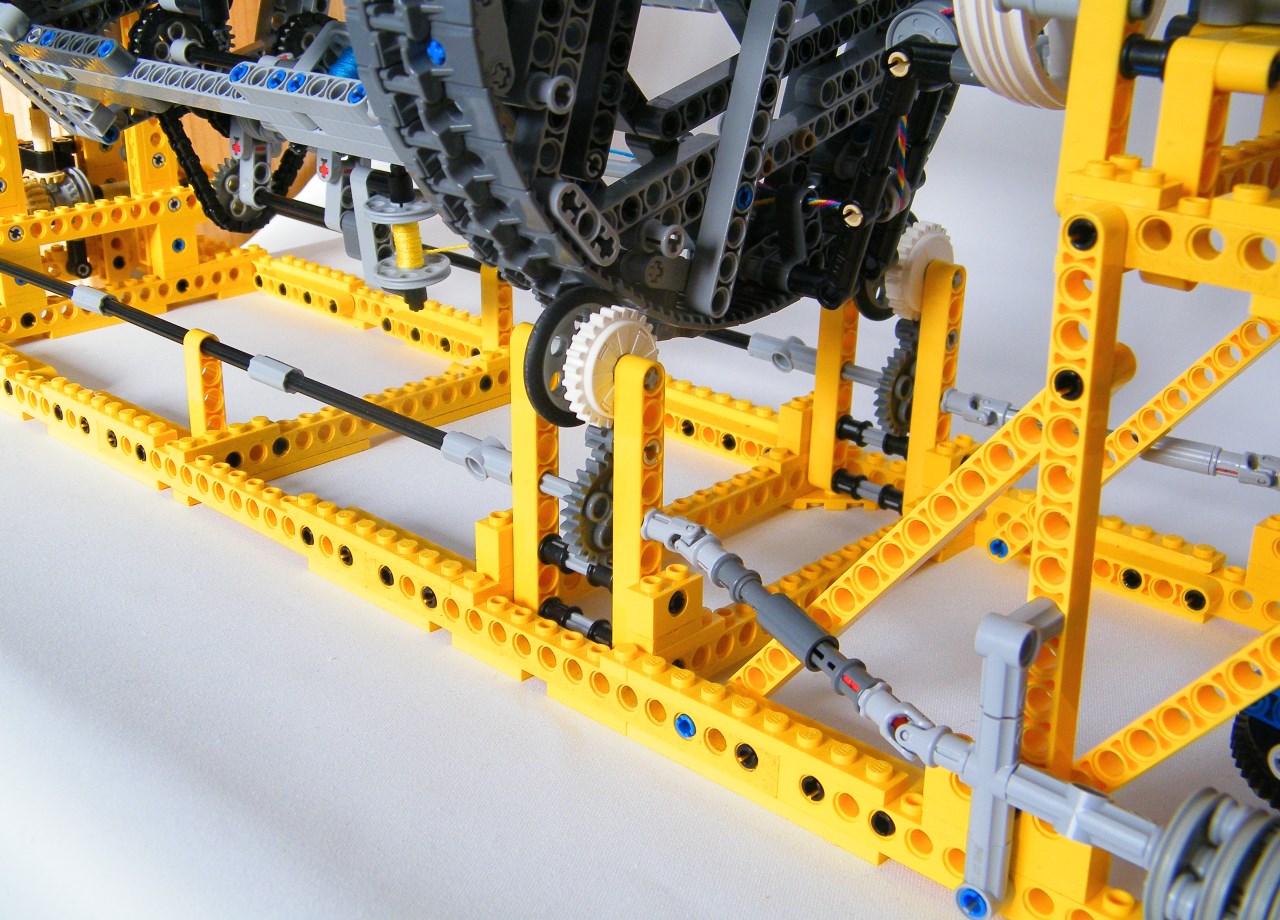
Vous pouvez voir aussi que les mécanismes de changement de palette sont maintenant découplés des palettes, on règle avec des engrenages 24t/24t. La précision est bonne, j'ai plus de problème à régler le synchronisme des palettes que le mécanisme de tirette.
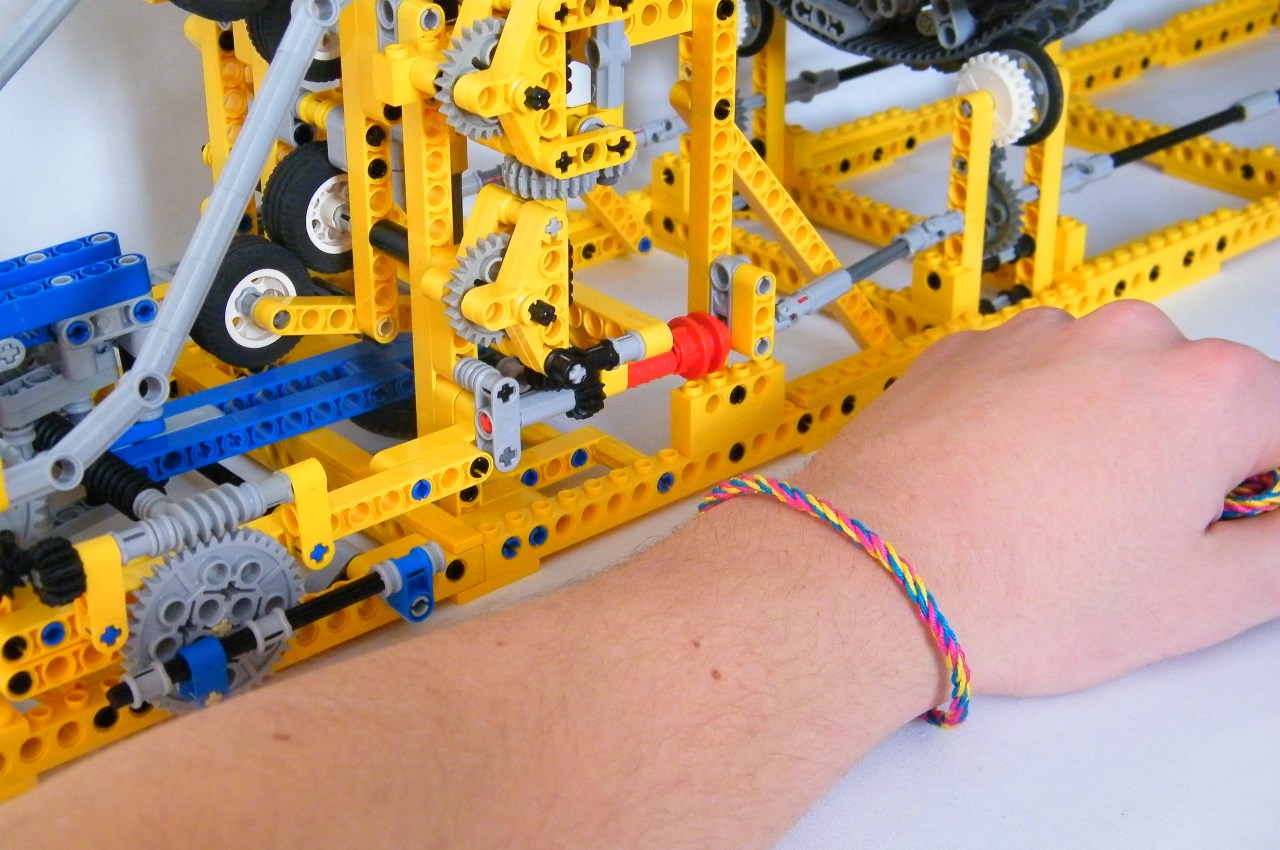
Vous pouvez voir aussi de nombreux liftarms rouges sur les axes des tirettes, ils servent à sécuriser la bobine pour éviter qu'elle ne soit éjectée de la palette par la forme centrifuge mais il y a encore quelques secteurs angulaires non sécurisés c'est pourquoi je vais faire des essais avec des flex, liftarms et des archs.
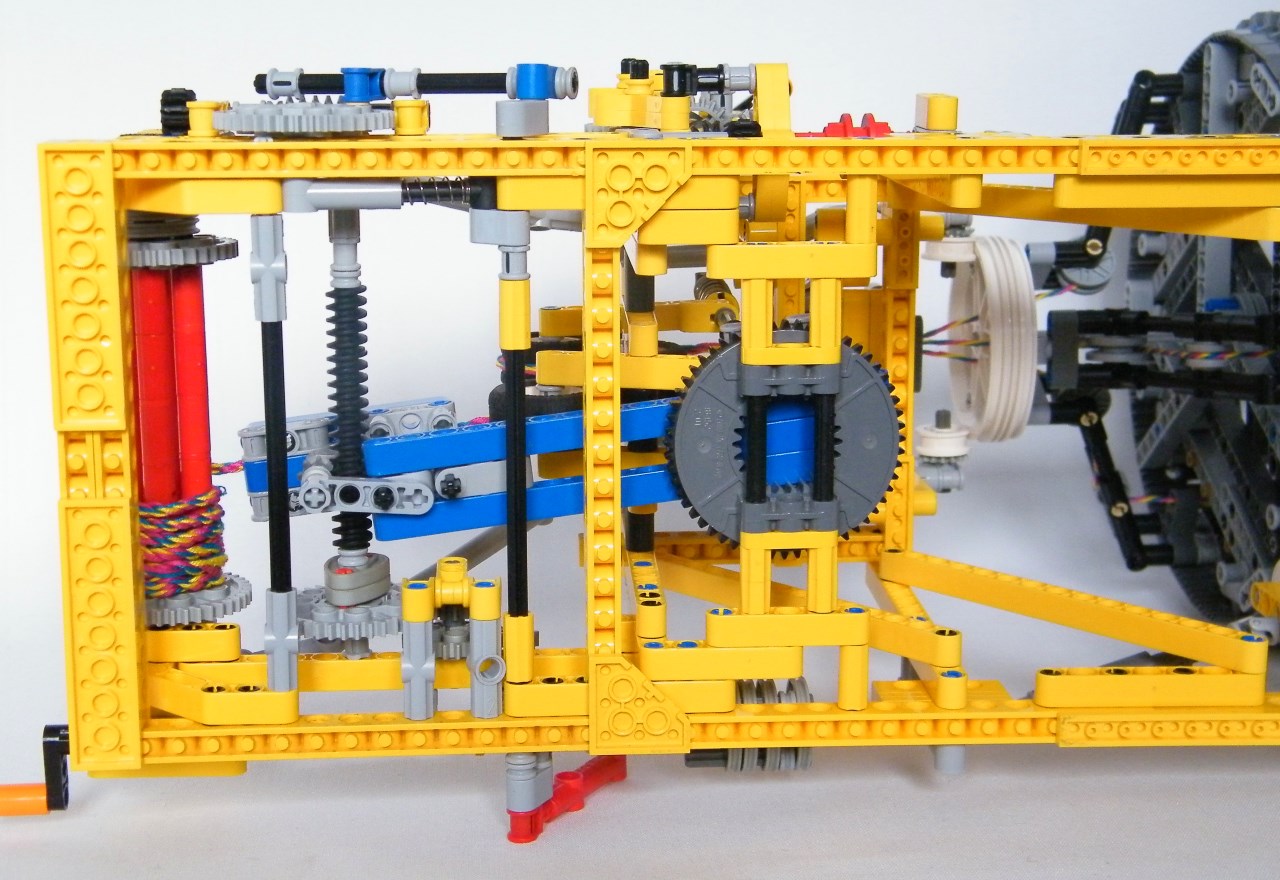
Concernant le problème du synchronisme, j'ai compris pourquoi j'avais un décalage. J'ai vérifié d'abord la configuration des palettes pour voir si au repos elles étaient bien toutes droites, c'est le cas, la tension est uniforme sur chaque brin de chaîne et la construction fait apparaître un carré parfait.
Sur chaque ensemble de 4 palettes reliées (un carré), aucun problème. En synchronisant finement l'ensemble, 7 palettes sur 8 tombent bien en face, la dernière n'est d'autre que celle motrice. En fait l’élasticité des chaines fait que même si toutes les palettes tombent en face en statique, c'est parce que la motrice à 9° d'avance (1 dent de 40t) sur les autres pour contrer le jeu de fonctionnement et du coup un écart en dynamique.
Donc pour éviter d'avoir ce défaut, plutôt que de mettre la synchro des palettes au niveau de la motorisation, je vais la mettre au plus proche des palettes pour limiter le jeu. J'ai essayé de synchroniser chaque jeu de 2 palettes accolées en mettant une chaîne et deux 24T entre les deux et ça fonctionne.
J'ai commandé de quoi faire les bobines et des engrenages et après je ferais la première vidéo
Ravi de voir que mon idée a servi! ca fait plaisir. J'attend avec impatience la video pour me rendre compte un peu mieux du fonctionnement!
Sinon, j'ai eu une autre idée sur le systeme de tirette. Comme la premiere, elle vaut ce quelle vaut, a toi de voir si ca peut faire avancer le schmilblick ou pas.
qd on regarde un intersection de deux palette on a s'apercoit que une fois la bobine vient de la pallette de gauche et part sur celle de droite et la fois suivante c'est l'inverse. N'y aurait-il pas moyen d'utiliser un systeme identique au GBC qd on veut faire partir alternativement une bille a droite et une bille a gauche avec un "Y" passif monté sur un pivot : la bille s'engage dans le chemin de gauche et en sorti de l'aiguillage elle agit sur une des branche du "Y" pour le faire basculer et donc pour que la suivante parte a droite.
J'ai pas de photo ou video sous la main mais je sais que c'est assez courant en GBC.
De cette facon le systeme de changement de pallette devient completement passif et tu n'aurais "plus qu'a" gerer leur entrainement et leur synchronisme....
Voila, j'espere que c'est compréhensible et qu'éventuellement ca te servira dans ton MOC. A+
Et je continue à faire des versions. Je me heurtais toujours au problème de synchronisme des palettes, en adoptant un système qui les met bien droite et bien en face, j'avais quant même un décalage sur deux d'entres elles. Décalage du au jeu des chaines même tendues vu que l'ensemble était entraîné par deux palettes. Pas moyen d'arriver à quelque chose de fiable.
J'ai décidé alors de diminuer le nombre de palette, d'essayer de construire avec 6 d'abords, plus simple et comme ça j'avais un hexagone parfait constructible en lego. Les photos présentent ce proto :
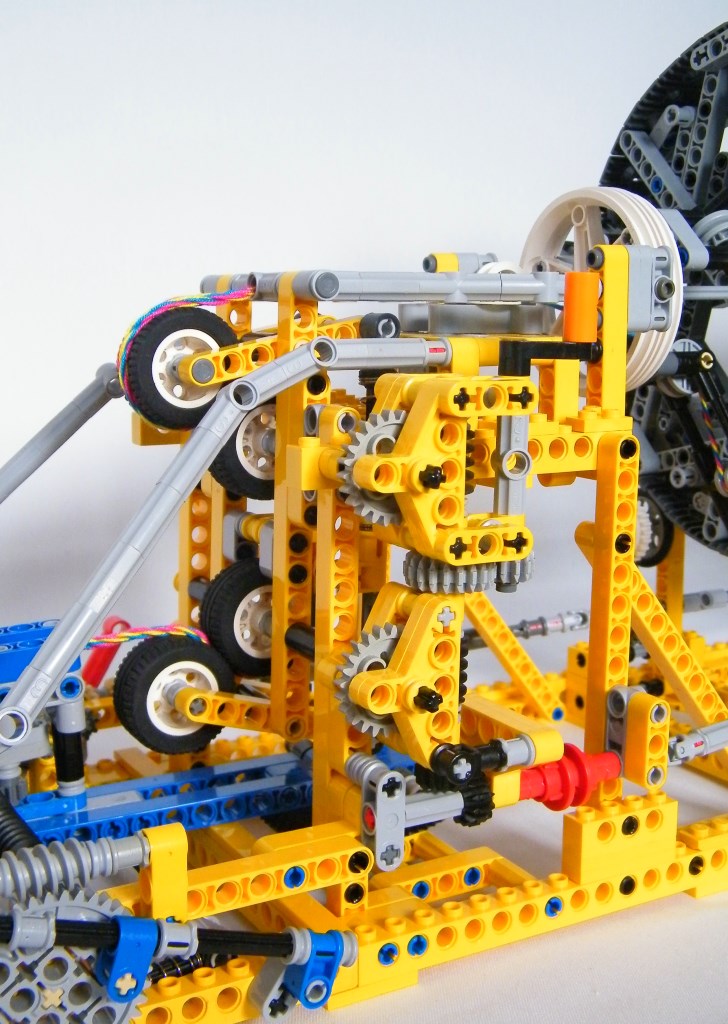
L'ensemble étant toujours synchronisé avec deux chaines mais cette fois, chacune engrène sur une 24t qui est reliée à l'autre système de chaîne, synchronisant ainsi par deux endroits les chaines. Et pour éviter le décalage de la palette entraînante, j'ai motorisé deux palettes une de chaque coté, et une dans chaque sens pour annuler le jeu.
Au final, ça marchait pas mal, les palettes tombaient bien en face, le passage des bobines allait moins poser problème.
Concernant les palettes vous voyez qu'elles ne sont plus doubles mais triples, pour deux raisons : d'abords parce que je voulais avoir une mécanisme parfaitement symétrique, là il y a une passage de bobine tout les 120° de rotation, avant il y en avait, une à 0° 45°, 180°, 225°, pas vraiment constant. Et ensuite parce que je voulais utiliser les poulies pour avoir un jeu entre palette. Je m'explique :
En fixant les palettes sur un trou, la distance du centre de rotation au trou de fixation et de 1t. En fixant les palettes sur 2 trous (couple l'un à coté de l'autre), la distance n'est plus de 1t, mais un peu moins (exactement cos(30)*1t=0,86t). Ce qui me permet de créer un léger jeu entre les palettes plutôt que 1t avant (sinon ça touchait). Vous remarquez aussi que chaque palette à un coté de bras plus long que l'autre, comme ça, les deux en rotation s'inscrivent bien ensemble et constituent un chemin sans discontinuité.
En revanche, comme les palettes sont triples et non doubles, il ne fallait plus 2 passages de tirette mais 6. Donc un engrenage entre les deux mécanismes, et là arrivent les autres problèmes. Avec un mécanisme tournant 3 fois plus vite qu'avant, je perdais en précision (surtout avec l’adjonction d'engrenage type 8/24 qui occasionne beaucoup de jeu) et donc forcément ça marchait bien moins !
D'autant plus qu'avec trois palettes au lieu de 2, l'écart angulaire toléré pour passer une bobine et forcément plus aigus et donc plus délicat à gérer.
L'un dans l'autre m'a fait finalement abandonné cette solution à 6 palettes. Mais j'ai repris plusieurs mécanismes pour la version 4 totalement différente : -le système de synchronisme -le système de palette triple
La V4 que je présenterai plus tard et la première qui fonctionne bien, il n'y a plus que 3 bobines mais l'ensemble est monté horizontalement plutôt que verticalement, l’élément essentiellement différent et que plutôt que de lutter contre la gravité qui n'autorise pas une bonne fiabilité, je l'utilise carrément en complément des tirettes pour passer les bobines, ainsi chaque bobine tombe en plus d'être poussée et comme il faut que le système fonctionne dans les deux sens pour entrecroiser les fils, la bobine doit toujours tomber, et pour ça, j'utilise un mécanisme de balancier !
Je vous présenterai ça en détail la prochaine fois, avec la première vidéo du modèle fonctionnel.
N'hésitez pas à poser des questions, j'essaye d'expliquer le mieux possible mes choix, il y a beaucoup d'essai entre chaque proto.
Arf, comme je ne prends que des photos puis démontage, la vidéo ne sera que pour les protos fonctionnels. Sinon je serais constamment en train de faire des videos / photos et presque plus de lego, parce que y'en a un paquet de proto ! C'est un choix de documenter pour le forum mais avec une certaine limite.
Si vraiment c'est incompréhensible, je ne posterais que le finish et non les protos.
Nico71 a écrit:Si vraiment c'est incompréhensible, je ne posterais que le finish et non les protos.
Non, ca reste fun. Et toi, ça te laisse une trace, ça peut toujours servir (moi, mes topic UCS, je m'en sers régulièrement).
Le truc c'est que vu le temps de conception des protos, la vidéo ca demande peu de temps en comparaison. Une vidéo de 1 minute qui présente un proto, tu la tournes en 15 minutes max (temps pour mettre en place le matos et le modèle toussa). Si t'as 3 proto, ca fait 45 minutes max en cumulé. Monter les 3 vidéos dans une seule et charger le tout sur youtube, ca doit pas prendre plus de 15 minutes non plus.
C'était plus là où je voulais en venir.
Bonne continuation (je continuerai de lire le topic quoi qu'il en soit)
Alban42800 a écrit:Bon c'est compréhensible Ton proto horizontal... euh... comment la tresse peut sortir si le "dessus" des bobines n'est pas libre ?
Oula, bien vu !
Il faut effectivement avoir un coté de libre. Ça ne change pas bien la conception.
Arf, à trop vouloir résoudre des problèmes, j'en oublie le principe de fonctionnement essentiel ^^
@Anio : si tu crois que je tourne une vidéo en 15minute, c'est que tu as tout faux. Entre la prise de vue (ou les prises de vues). Les raccords, les vidéo juste pour les raccords, l'éclairage, la prise de son, la verif, le montage et la publication, ça me prend bien plus de temps que ça. C'est sur si c’est pour prendre 1 minute de fonctionnement (qui ne fonctionne pas d'ailleurs) en prise fixe sans rien de qualité (éclairage son et raccord), ça prend 30 min mais j’appelle pas ça de la qualité, ça fait un peu tache sur la chaîne (d'autant plus que je n'aime pas l'information diluée). ^^
ps : je passe autant de temps en infographie qu'en lego, donc si, ça me prend du temps, même sur un moc complexe.
Nico71 a écrit:Arf, comme je ne prends que des photos puis démontage, la vidéo ne sera que pour les protos fonctionnels. Sinon je serais constamment en train de faire des videos / photos et presque plus de lego, parce que y'en a un paquet de proto !
Je te comprend tout à fait, les protos d'essai ça passe par tellement de stade qu'il serait difficile de faire une vidéo à chaque fois
Nico71 a écrit:Si vraiment c'est incompréhensible, je ne posterais que le finish et non les protos.
Surtout pas , c'est super intéressant. Certaines subtilités nous échappent surement mais le fonctionnement global est le même pour tout tes protos, ça reste très compréhensible.(bon un bagage technique ça aide aussi ) Je pense que la principal difficulté de compréhension vient du fait que ça sort de l'ordinaire.
Sur ton premier proto, quand j'ai vu toute cette chaine pour synchronisé les palettes je me suis tout de suite dit que ça allais être très chaud, surtout avec les bobines chargées. La V4 semble plus prometteuse. Que deux rotation à synchronisé ça va forcement beaucoup réduire la difficulté. Très bonne l'idée de berceau pour faire tomber les bobines d'une palette à l'autre. Enfin je dit berceau mais bébé va pas aimer: ça doit bercé plus tôt vite vu que tu doit changé de coté à chaque fois que les palettes s'alignent. Petit détail: les bobines sont mal placées sur les photos non ? Au prochain alignement tu auras pas de logement vide sur la palette réceptrice.
Hugolin a écrit:Petit détail: les bobines sont mal placées sur les photos non ? Au prochain alignement tu auras pas de logement vide sur la palette réceptrice.
Tu as l’œil
Comme tu le dis, mécaniquement plus simple, il vaut mieux commencer comme ça plutot que l'inverse.
Petit message pour dire que finalement je mets en pause le métier à bobiner pour l'instant. En effet j'ai beaucoup de mal a avoir un prototype fonctionnel et suis à court d'idée pour l'instant. Donc je mets en pause le temps d'y revenir plus tard
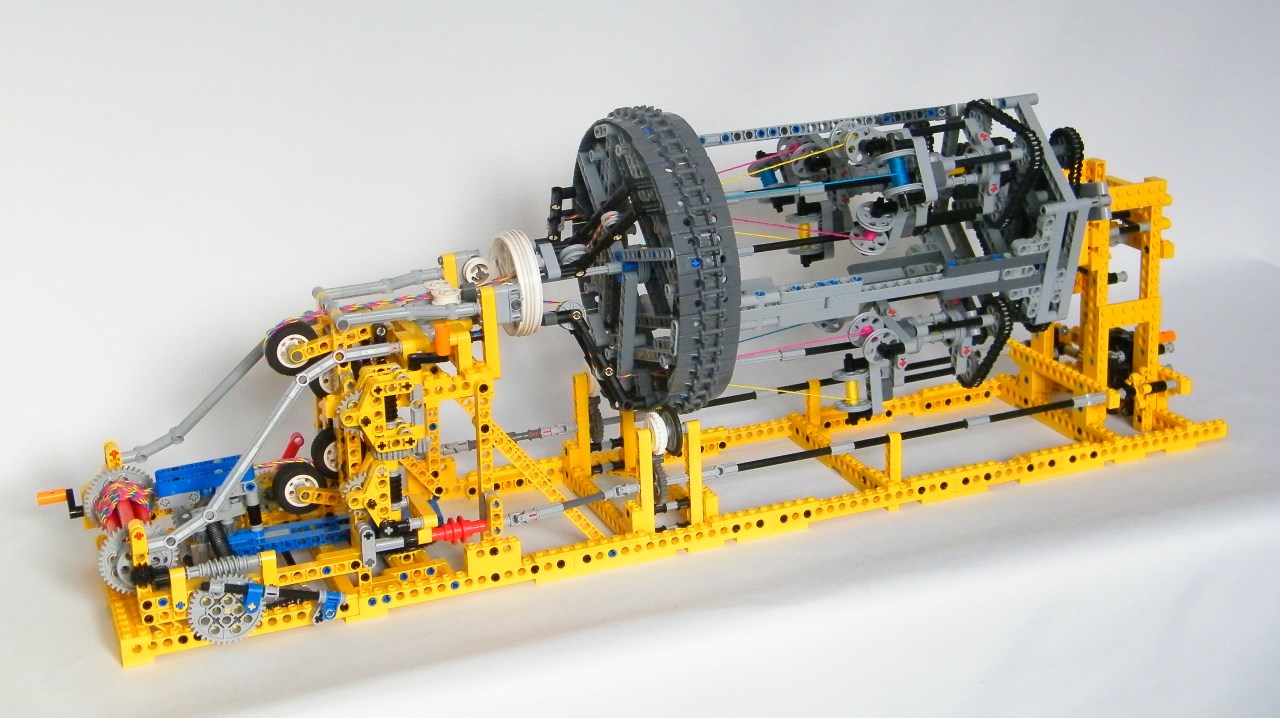
En cette période de fête, je vous présente le métier à tresser fini ! Plus précisément, métier à tresser des cordes ou des bracelets. Une vue d'ensemble d'avoir pour bien comprendre de quoi on parle :
Il est radicalement différent des premiers métier à tresser que j'ai posté dans ce topic, la raison principale est qu'il ne tresse pas de la même façon ! Les métiers précédemment tressent la corde en entrecroisant plusieurs fils, ici ils ne l'entrecroisent pas mais l'entortillent !
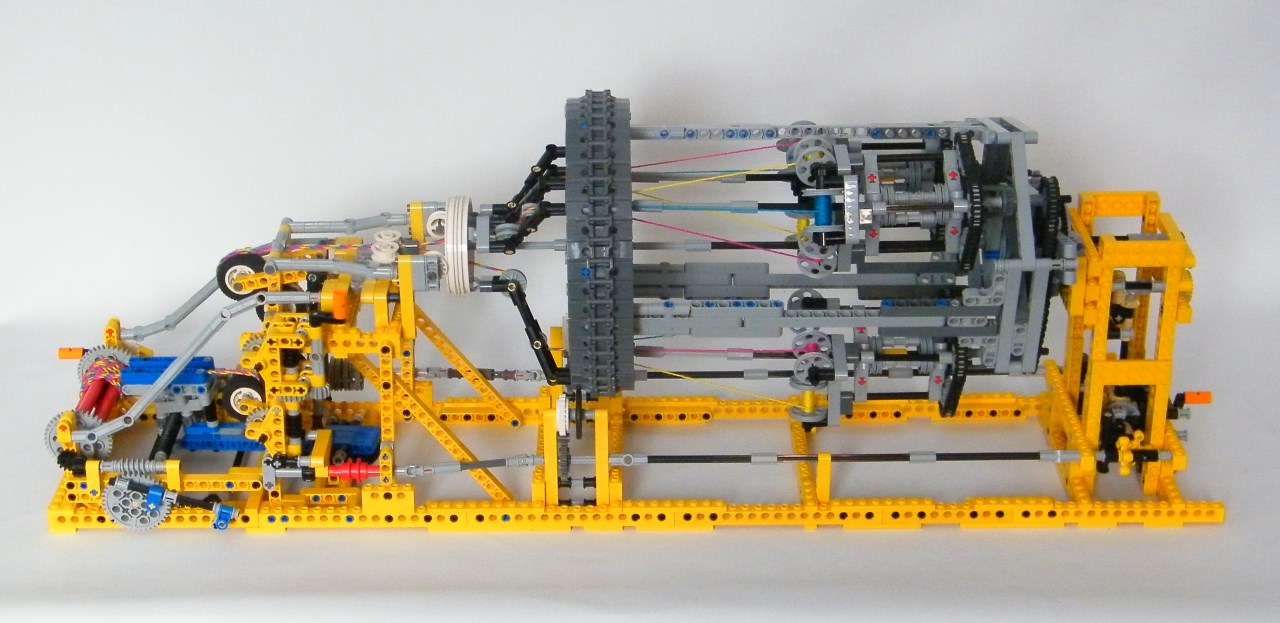
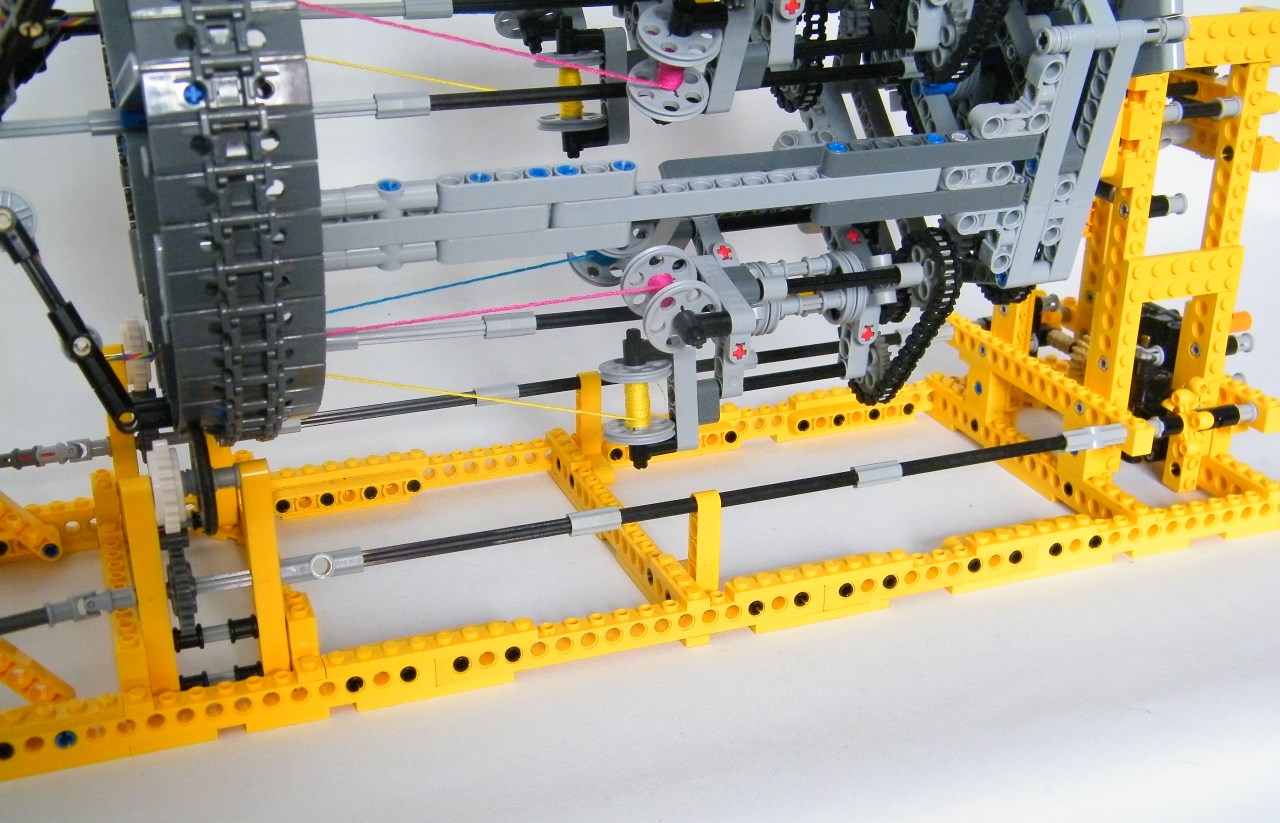
Au niveau vocabulaire, de gauche à droite sur la photo du bas, on a : -le dispositif d'entrainement (la tour jaune) qui entraîne le tambour principal et les 3 satellites -le tambour principal (je ne vous fais pas l'affront de vous dire où il est tant on ne voit que ça) -les satellites avec 3 bobines par satellites qui passent dans 3 filières -la filière principale (roue blanche) qui condense les 3 tresses en une seule -le mécanisme d'enroulement à pneus qui tire sur les cordes pour faire avancer le motif -le guide enrouleur en bleu qui permet d'enrouler sur le tambour final -et le tambour final qui stocke la tresse finie
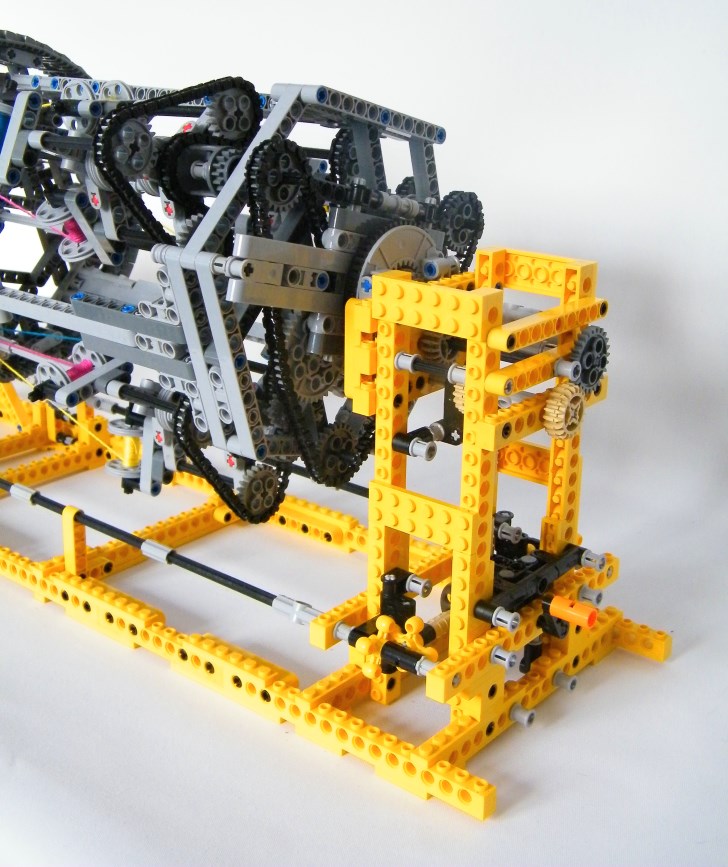
Pour comprendre le rôle de chaque constituant, on va partir du début de la chaîne cinématique jusqu’à la fin de la fabrication de la tresse. En premier lieur, le dispositif d'entrainement principal :
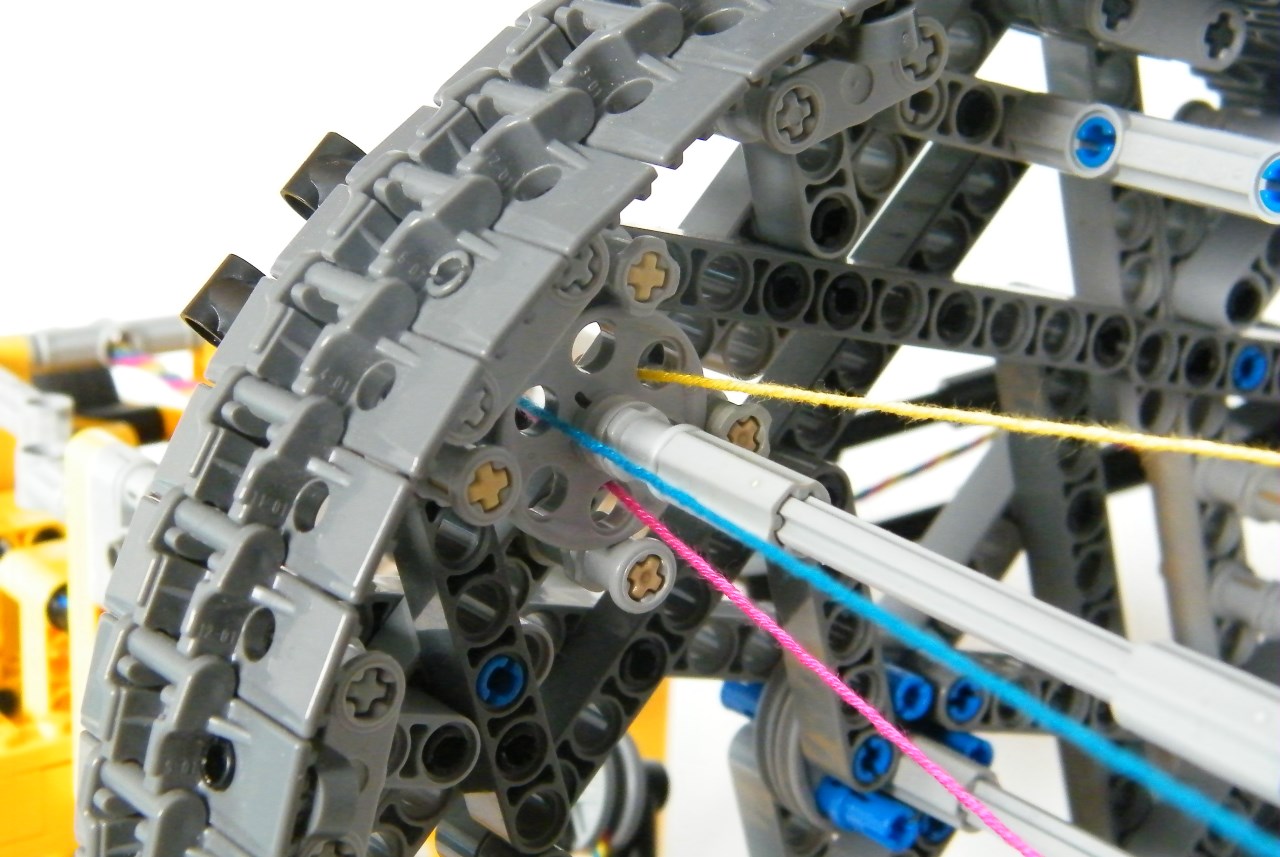
Le moteur étant logé (ou la manivelle) dans le bas, un renvoi 12/20 fait monter le mouvement en haut de la tour, puis une série d'engrenage fait tourner indépendamment le tambour des satellites. Le tambour est mis en rotation avec une 8t sur une turntable soit 1/7, tandis que les satellites sont mis en rotation avec un rapport de 20/24 12/20 soit un rapport de 1/2 avec une inversion de sens. Les satellites tournent ainsi en sens inverse du tambour principal (c'est important !)
Le tambour principal est entraîné via la turntable mais aussi sur la couronne composée de chenille à l'envers via deux roues caoutchoucs. Les axes qui sont de chaque coté servent à cela (ainsi qu'a motoriser les autres dispositifs). La présence d'un clutch s'explique par une différence de vitesse d'entrainement de 0.1 entre la couronne et la turntable, ce qui ne pose pas de problème à l'usage.
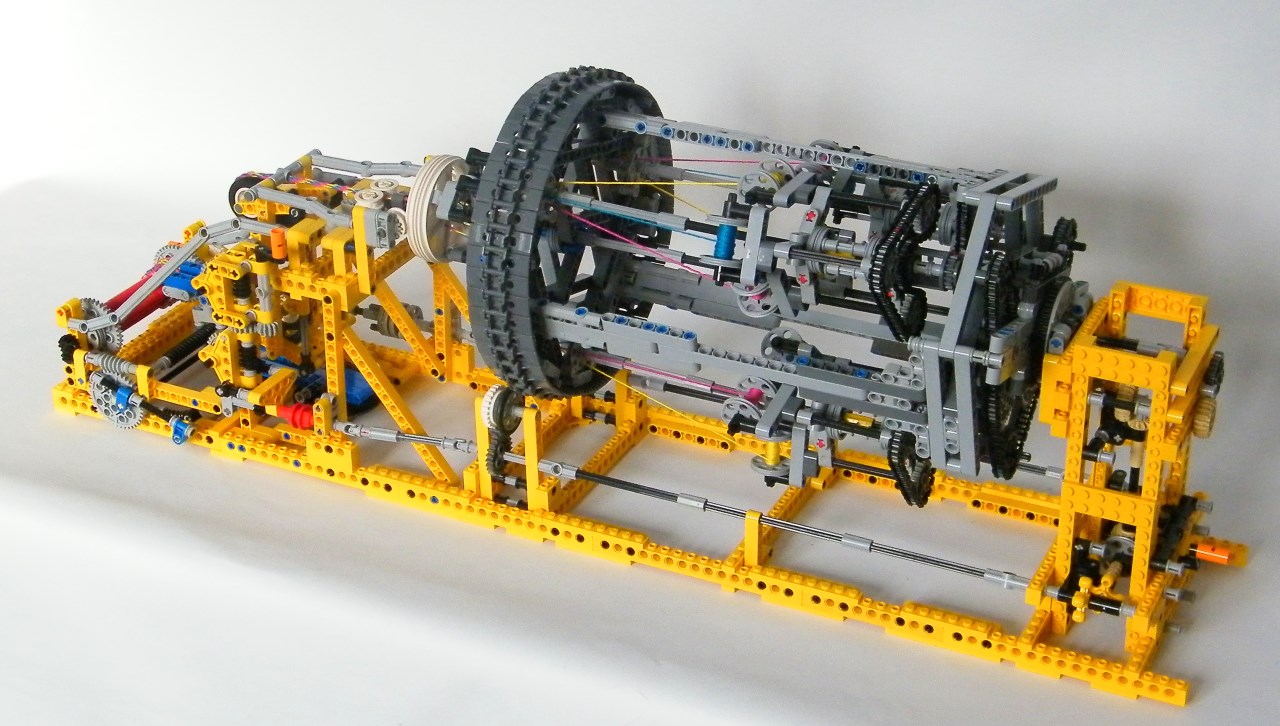
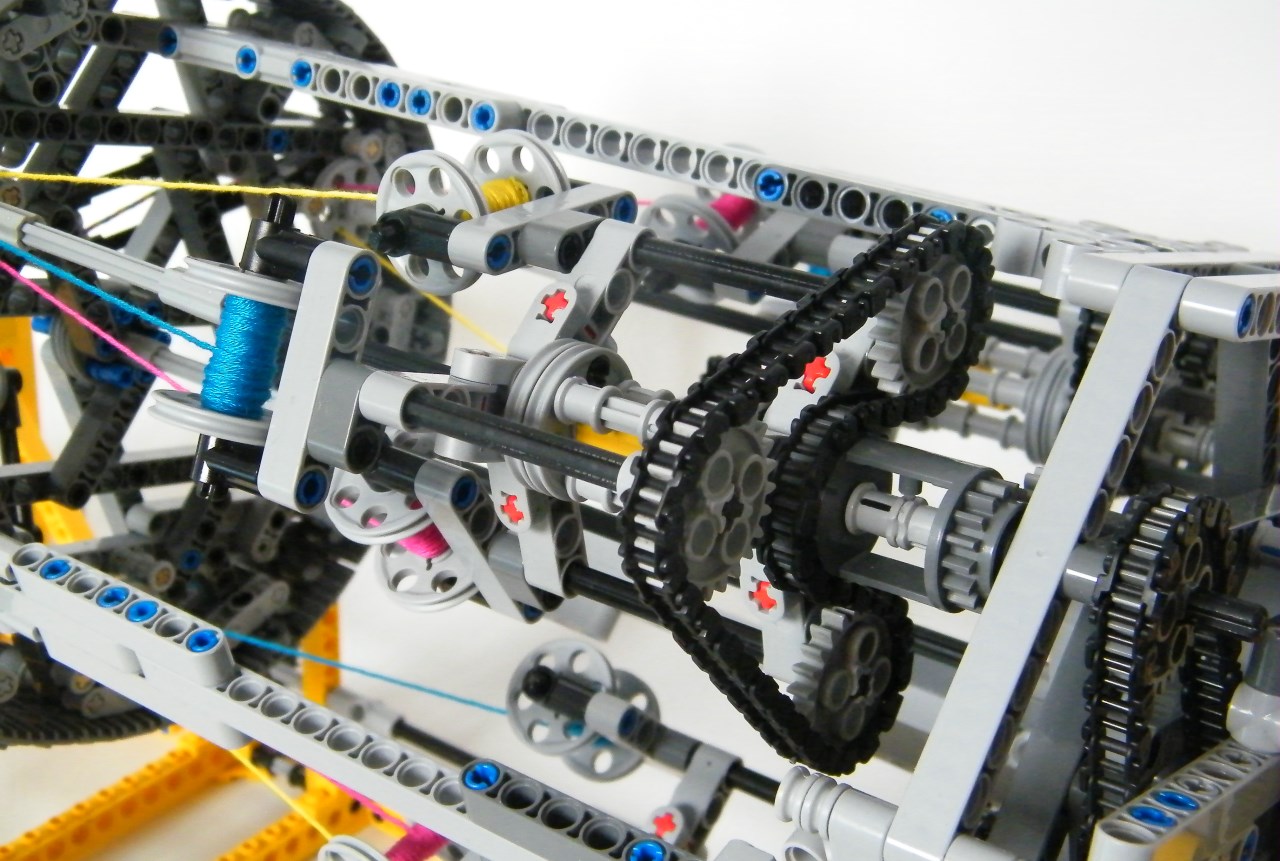
On arrive sur l'entrainement des satellites et des bobines :
L'ensemble des satellites est entraîné via une chaîne qui parcoure tout le pourtour de l’hexagone de la structure. Chaque satellite comporte 3 bobines de fils montées elles aussi sur une structure tournante. Vous pouvez voir une chaîne reliant les 3 bobines et passant au centre de l'axe. Cette chaîne sert à faire tourner les bobines sur elle même lorsque les satellites tournent (le différentiel étant fixe), eux même tournant dans le tambour (oui ça tourne beaucoup la dedans...). Donc : -les bobines tournent sur elle même -les satellites (portant 3 bobines chacun) tournent sur eux même aussi. -les 3 satellites sont montés dans le tambour, et le tambour tourne aussi.
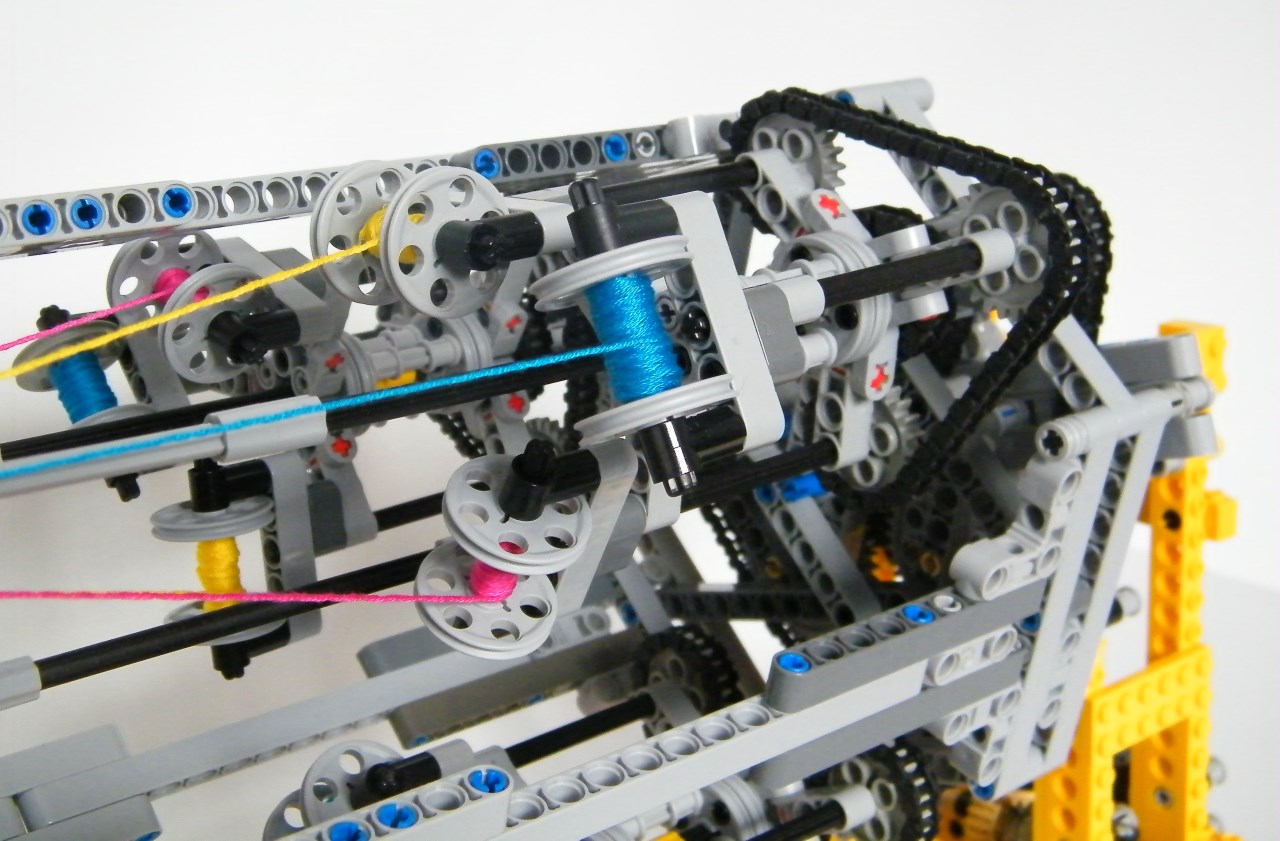
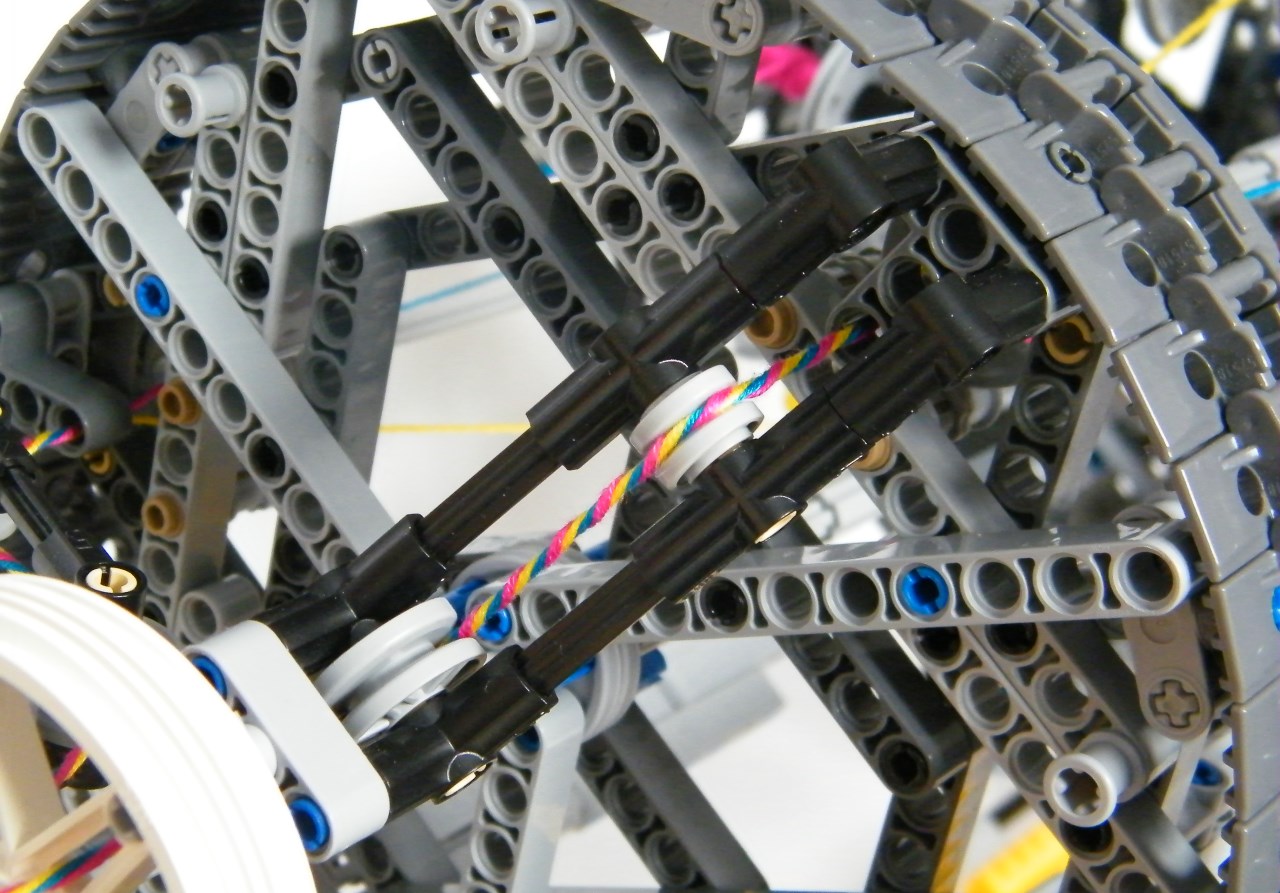
Les trois fils d'un satellites (sur 3 bobines donc) sont ensuite condensés en un seul grâce à une filière placée en bout :
La filière ici est le liftarm en forme de T. C'est le point important à comprendre pour comprendre le tressage. Les 3 fils sont guidés à l'intérieur de la roue poulie à 6 trous et rencontrent après la filière qui est fixe (tandis que la poulie tourne). C'est ce qui crée le tressage par enroulement sur eux même des câbles. Vous comprendrez alors l'utilisation de la poulie et de son guidage en rotation sur son pourtour (via des bushs tournant) car il est impossible de mettre un palier en bout d'axe (à gauche ou à droite de la poulie) comme il est tournant et avec des fils, les fils ne pourraient pas passer.
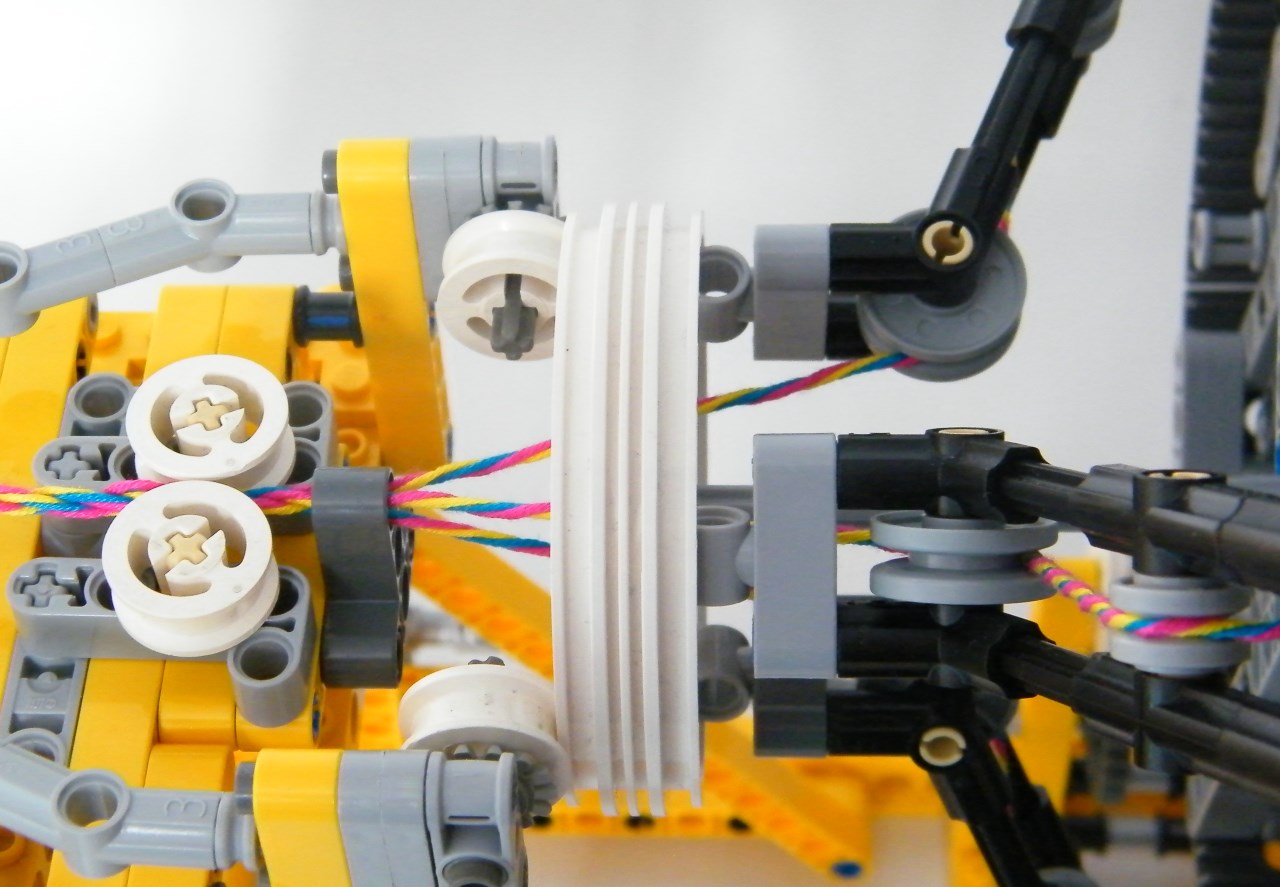
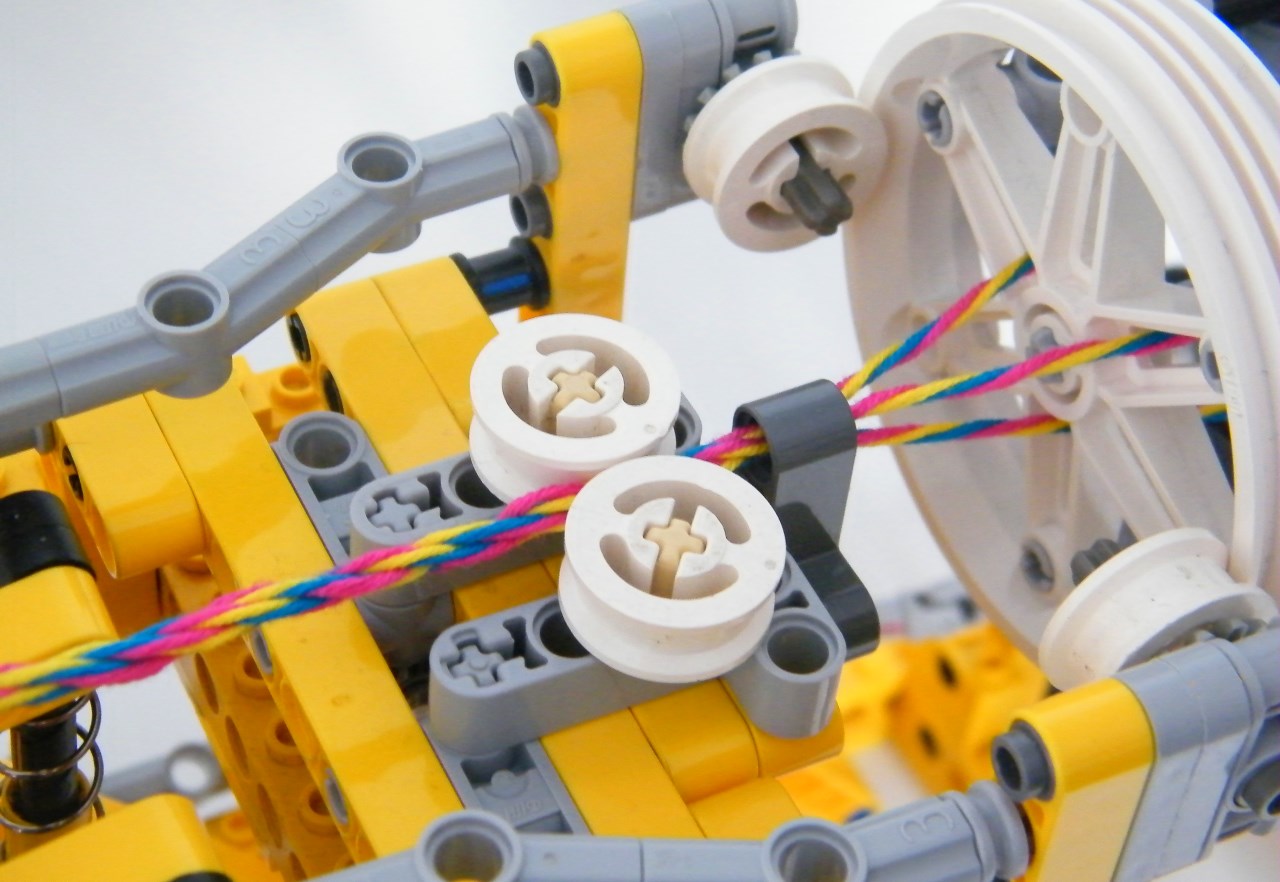
Ainsi à la sortie de chaque filière de satellite, on dispose d'une corde à 3 fils. Soit 3 cordes au total. On arrive ensuite sur la filière principale :
Cette filière reproduit exactement la même chose que les 3 précédentes filières. La roue blanche étant tournante avec les 3 tresses dedans, elles rencontrent la filière (pièce en T) ce qui les force à s'entortiller. Créant ainsi la tresse final constituée de 9 brins entortillés 3 par 3.
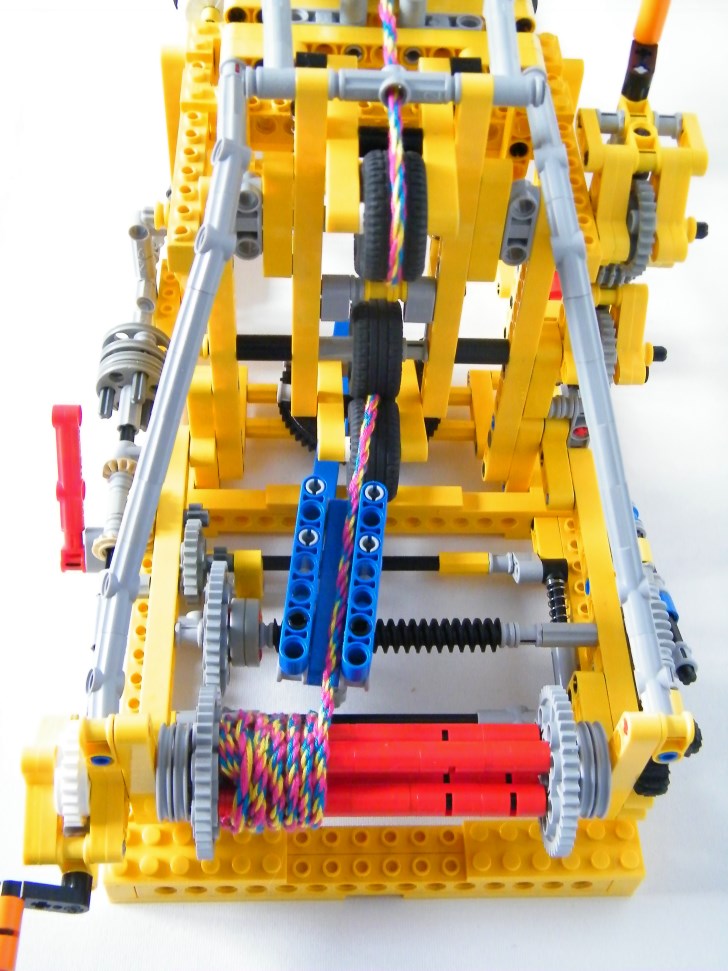
Le dispositif suivant est le dispositif moteur de l'avancement de la tresse. Le premier servait à mettre en rotation les tambours ainsi que les satellites. Celui la tire sur les tresses pour enrouler et créer ainsi la tresse (si on tourne sans enrouler, les tresses se bloquent alors dans les filières, il faut que les vitesses d'avance et d'enroulement soit synchronisées).
Le mécanisme d'entrainement est constitué de deux trains de pneus entraînés via des vis sans fin sur 24t. Deux roues sont montées en pivot sur le châssis, les deux autres sur des bielles, le tout mis en contrainte via des ressorts. Ce dispositif permet d'assurer une préhension de la tresse parfaite pour enrouler. Les fils devant être tendus, la force nécessaire pour tirer les 9 bobines est assez élevée (peut être 500g de tension au total). Les deux trains de pneus sont motorisés avec leur propre système de vis sans fin, les efforts étaient trop important pour n'en motoriser qu'un seul ou les relier via des engrenages. Mécaniquement c'est plus simple et plus robuste.
On arrive au système d'enroulement final qui ne sert qu'à stocker la corde, et non à la tirer. En effet, mes premiers tests ou le tambour était moteur (comme sur le métier à tisser) ne convenait pas à cause des efforts trop importants, il était soit impossible d'enrouler correctement, soit la tension était trop importante sur les pièces lego.
Le tambour final est entraîné via une vis sans fin à une vitesse légèrement supérieure à l'avancement du câble, de cette façon il n'y a jamais de mou mais pour éviter une tension grandissante à mesure, l'axe est monté avec un clutch qui débraye dés que ça tire un peu trop fort (la différence de rapport est de 0.1).
Enfin, le guide en bleu que vous voyez est un enrouleur automatique qui va de droite à gauche pour enrouler la tresse correctement sur le tambour. Il fonctionne en oscillation et est mu par un entrainement linéaire type Vis sans fin sur 8t. Sur l'arbre moteur, il y a un inverseur de sens constitué d'un axe pouvant se déplacer et engrainant une roue dentée ou une autre. Les deux étant placés sur le même axe, le sens est inversé selon laquelle entraîne la vis sans fin ce qui permet de faire les allers retours de l'enrouleur. Pour que l'axe moteur puisse de déplacer en entraînant quant même le tambour final, il est monté avec un accouplement à longueur variable (poulie avec 3 axes) ainsi qu'une vis sans fin qui laisse coulisser l'axe.
Le changement de sens de l'enrouleur (pour le renvoyer de gauche à droite) était initialement fait avec une butée : lorsque l'enrouleur arrivait tout à droite ou tout à gauche, il changeait de sens en poussant un mécanisme. Sauf que si ça marche dans un monde ou les points morts n'existent pas, ici ça ne fonctionnait pas. Arriver presque en butée, l'enrouleur commençait à changer de sens puis tombait sur une position non engrainé (position de transition nécessaire pour avoir du jeu de fonctionnement). Et donc restait immobile.
Pour résoudre ce problème, j'ai simplement confié le changement de sens à un système dissocié de l'entrainement de l'enrouleur. Ainsi même si l'enrouleur s’arrête, le système peut continuer à changer de sens. Ce système se matérialise par un système bielle manivelle entraîné par le tambour final (en bleu avec la 40t sur la photo).
Enfin, le mécanisme de l'enrouleur est monté sur une bielle à ressort pour assurer le maintien en position dans un des deux états.
Voila pour le tour des constituants, maintenant une question qu'on peut se poser est "oui mais si on entortille des fils, ils vont se défaire à mesure ou former des nœuds !?!" Et vous avez raison ! Comme avec n'importe quelle saloperie de câble, si on l'enroule ou entortille il aura tendance soit à faire des nœuds soit à vouloir revenir dans sa position initiale.
C'est ici que la rotation des bobines et des satellites à une importance. On pourrait très bien faire une tresse sans faire tourner ni les bobines ni les satellites ! Mais en les faisant tourner sur eux même, on les met en tension progressivement, puis on les enroule ensemble, et arrivées sur le tambour final elles reprennent leur état stable, sauf que comme on les a vrillé, elles se vrillent dans l'autre sens, et l'autre sens c'est le sens qui permet de faire tenir la tresse ensemble (le même sens d’enroulement principal).
Pour faire simple, si on fabrique une tresse finale à droite, les brins qui la constitue doivent être enroulés sur eux même par la gauche, puis vrillés ensemble sur la droite, ainsi la tresse se tiendra car en voulant se remettre dans leur position naturelle (par la droite donc, l'inverse de la position vrillée à gauche), ils se vrilleront par la droite, ce qui est le sens de la tresse et donc auront tendance à resserrer la tresse.
Si on fait ça 3 fois d’affilé en inversant les sens de rotations, on obtient une tresse qui se tient parfaitement !
A noter aussi que si vous regarder bien les fils qui sont enroulés dans les bobines, ils sont déjà constitués de minuscule brins entortillés ensemble (avec la même méthode que précédemment). C'est pourquoi déjà il faut monter les bobines dans le bon sens sinon on défait les minuscules brins entre eux ! (et là bonjour pour espérer démêler tout ça !)
Pour finir, je vais juste parler de deux trois astuces de construction pour faciliter le réglage du métier.
La tension principale peut être contrôlée via la manivelle en haut, pour cela on désaccouple le driving ring rouge pour pouvoir tourner librement la manivelle.
Au niveau du tambour final, on peut aussi régler finement la tension ou enrouler à la main sans faire tourner l'ensemble via la manivelle. Un accouplement à friction permet ainsi d'agir sur le tambour même si le système est arrêté.
Enfin, via la manette rouge, on peut forcer l'enrouleur à changer de sens ou le mettre au point mort pour tourner librement son axe est régler ainsi finement sa position de départ.
Enfin, voici quelques prises pour voir le motif du bracelet final, les couleurs sont bien entendues au choix
Vous avez tout lu ? Tout compris ? Non ? Bien, la vidéo est fait pour ça !
Pour conclure sur les difficultés de ce moc, je dois dire que j'ai pas mal galéré à obtenir une structure pour le tambour ainsi qu'un contour en chenille relativement rond.
Le mécanisme d'entrainement de la tresse est le mécanisme qui m'a causé le plus de soucis, et où il y a eu le plus d'essais. Celui ci au final, parait presque trop simple et évident et pourtant il y en a eu des biens plus compliqués et moins performants.
Aussi, le système d'enrouleur a été dure à régler, pour obtenir un enroulement bien linéaire (création d'une fonction triangle en réalité). Les tests avec les bielles manivelles et autre sotch yoke ne donnait rien de bon.
Et enfin, un point très important non lié à la construction lego mais au tissage même : l'histoire de l'inversion de sens entre les brins et les tresses. Cela parait presque évident maintenant mais j'ai galéré pas mal et étant en développement, je rejetais la faute systématiquement à la solution lego utilisée, jusqu’à obtenir une première tresse potable mais qui quand je l'ai enlevé du métier, c'est totalement déroulée sous mes yeux, et je me suis retrouvé avec 9 brins non enroulés
La construction étant relativement propre est simple, je pense faire quelque photos pour faciliter le montage / remontage bien qu'il faille un sacré stock de pièces spéciales (poulie, 24t, chaine, VSF et studfull), au final je ne pense pas qu'il y ai plus de 1000 pièces.
C'est assez fou cette création, c'est la que l'on voit que les lego ont un énorme potentiel puisqu'ils peuvent être détournés de leurs buts premiers ( les engins de chantiers ect. ) Le plus imprésionnant je trouve c'est que le tambour reste stable et tourne bien sur son axe, alors qu'il est énorme ! Je ne m'atendais pas dans la vidéo à voir le tambour et les satellites tourner aussi vite. Bravo
Dernière édition par ExiTeD le Sam Déc 28, 2013 12:36 am, édité 1 fois au total.
Je suis resté sans voix devant ton métier . Un truc de malade. Je n'ai pas saisi le fonctionnement de l'inverseur de sens du guide de treuil, tu peux détailler son déclencheur stp ?











.gif ":)")























.gif ";)")



 extraordinaire, passionnant et fonctionnel. Félicitations. Lego devrait t'offrir une palme pour ce que tu arrives à concevoir avec leur système !
extraordinaire, passionnant et fonctionnel. Félicitations. Lego devrait t'offrir une palme pour ce que tu arrives à concevoir avec leur système ! .gif "8)")




 . Un truc de malade.
. Un truc de malade.