

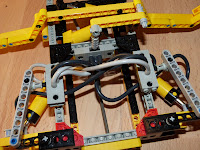
je voudrais vous présenter une petite réalisation entièrement légo cette fois ci. Il s'agit d'un automate hexapode lego. Je dis automate car sur chaque vérin est monté un interrupteur pneumatique. Cette configuration me permet de faire des séquences et donc simuler simplement la démarche d'un insecte =)

J'ai mis toutes les infos sur cette réalisation (et de nombreuses photos) sur mon blog:
http://artiom-fedorov.blogspot.fr/2012/07/robot-automate-lego-technics-hexapod.html
Qu'en pensez vous? =)




.gif ";)")

.gif ":)")




