



Salut,
A voir comment se comporte ton rotor, mais si tout va bien, je dirai : NE CHANGE RIEN!
Sur une masse tournante et pour laquelle on veut changer l'orientation, il y a un effet qui se fait sentir, et qui s'appelle la précession gyroscopique: le résultat est que pour que le disque du rotor s'incline vers l'avant, il faut que le mouvement provoquant l'inclinaison se fasse 1/4 de tour avant, en gros, sur la gauche ou la droite, selon le sens de rotation du rotor!
Florian
Hélicoptère Bell UH1 Huey
|
Ah ben voilà, je comprends mieux!
Donc tout est parfait. Merci pour l'info. Je fignole quelques trucs : ajout de la banquette arrière, un second set de leds, correction des couleurs du pare-brise, et deux trois autres broutilles et puis : review générale. Allez A+ |



|
Super!
Sinon, après avoir longuement épluché ce que j'ai pu trouver sur les rotors de Huey, il s'agit en fait d'un rotor rigide: l'ensemble du rotor devrait pouvoir s'incliner en variation de pas cyclique, et l'angle des pales devrait être variable pour le collectif. Mais vu le bordel qu'est la tête de rotor du vrai, je te conseille de garder la tienne! Vu l'échelle, ça parait difficile de reproduire fidèlement. Surtout que les angles d'inclinaison permis sont peu importants, donc peu flagrants en lego Flo |
|
Tout cela pose la question rhétorique de savoir où on s'arrête...
Je n'ai pas l'intention de modifier (encore) cette tête de rotor. J'ai pris énormément de plaisir à me documenter, chercher, essayer, démonter etc... Je suis arrivé à un résultat qui me plait. Basé sur des données techniques cohérentes vis à vis du fonctionnement réel d'un hélico. Alors si le modèle dont s'inspire le Moc est légèrement différent, ok. A un certain stade, on s'éloigne d'une réalité pour une autre. Le Moc prend vie, et c'est dans la réalité LEGO que l'on plonge. La part de l'imaginaire contre le rationalisme. J'en reste là, donc. Et je pense pouvoir dire que c'est déjà pas mal du tout... .gif ";)") Merci pour votre aide, particulièrement Flo , et à bientôt pour conclure et clore l'aventure de ce Moc.Steph. |
|
J'arrive après la bataille mais cela vous interessera sûrement, en faisant une recherche sur WikiPedia, je suis tombé sur les explications concernant cette barre stabilisatrice
[Edit ON] avec ces schémas de brevet:  et les explications in english: et les explications in english:  La commande du collectif se faisant par le renvoi d'angle 156 tout en bas, actionnant le manchon 138. La commande du cyclique se faisant par la pièce 175, actionnant les barres 162 (jaunes) qui translatent l'une vers le haut lorsque l'autre va vers le bas (tel que, on dirait qu'elles bougent dans le même sens en même temps, mais non). [Edit OFF] Réflechissant à ton problème de 1/4 de tour d'avance, la commande se fait bien via cette barre stabilisatrice? Elle même en avance de 1/4 de tour (sur le rotor) par rapport à la pale qu'elle commande? Donc... cela ne parait-il pas normal que tes commandes soient décalées de 1/4 de tour en cyclique? Mais cela devrait se voir en statique et non uniquement en dynamique (confirmes tu?). J'ai essayé de décortiquer la dernière vidéo que tu as posté mais comme il ne s'agit pas de la "bonne" version de Barre-Stab... Perso, cela me gêne d'avoir les commandes "à l'envers", donc même si ta décision est prise de figer ce très beau MOC, je m'attends à une V-2.0. Dernière édition par spoutnix le Dim Fév 12, 2012 3:54 pm, édité 1 fois au total.
Spoutnix.
|








|
Salut à tous!
Après avoir consulté le forum dans la rubrique appropriée j'ai téléchargé MLCAD ainsi que la dernière version des pièces. Malheureusement je n'y trouve pas mon bonheur, ni les pièces type panels etc. Il me faudrait l'inventaire d'une supercar 8070 puisque le MOC est pratiquement un one set Moc issus de ce modèle. Quelqu'un peut-il m'aider et me dire, au passage, si ce logiciel est bien celui qui convient le mieux. Est-il normal qu'il n'y ait pas de notion d'emboitement des pièces, des positions prédéfinies, pour incliner une pièce d'un angle quelconque, comment faire? En bref il me faudrait un bon tutoriel ... Vous aurez compris l'objectif.... Et comme je ne renonce en général pas vite, ça risque de mettre le temps mais j'y arriverai !Merci de votre aide.  |
|
Si tu veux mon avis, prend plutôt sr3dbuilder, il y a des positions prédéfinies, et le tout est très instinctif. Les pièces peuvent aussi être facilement trouvées en tapant quelques mots clés (du style beam, axle,pin,...).
|


|
Essaye avec SR3D Builder
Au passage, ton MOC est super ! On reconnait le design sublime du Huey au premier coup d’œil ! Félicitations ! Edit : grillé pas GuilliuG Ma galerie brickself :
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=413531 Ma chaine YouTube : http://www.youtube.com/user/GeekApple78 |


|
Je modélise avec SR3D, j'ajoute les flexs et hoses avec Mlcad, je fais la notice ensuite avec Lpub. Si tu as des questions, n'hésite pas à lire le topic SR3D ou LPUB ou MLCAD dans la section "les legos sur le PC" et à poster ensuite.
|
|
Idem Nico, avec des étapes supplémentaires sur la fin :
- Modélisation, découpage en sous-assemblages et découpage des steps sous SR3D - Génération des éléments souples, ré-assemblage et ajout des balises STEP dans MLCad - Génération de la notice et exportation des images en PNG dans Lpub - Édition des PNG (fond transparent, ajout du contour blanc sur les pièces noires) par une moulinette dans Photoshop - Mise en page dans InDesign Pfiouuh ! Quand je repense au temps que ça m'a pris !!  Mais ça en valait la peine ! Mais ça en valait la peine !     |


|
Ca y est ! Il est fini et c’est donc avec grand plaisir que je vous propose une :
REVIEW   Le projet remonte à très longtemps. Il m’a fallu des années et la stimulation apportées par les MOCs d’autres AFOLS pour me relancer dans l’aventure. Le projet est de réaliser un hélicoptère fonctionnel, aussi réaliste que possible. La première étape, détaillée dans ce Topic a été de réaliser un démonstrateur pour les commandes et un second intégrant une première ébauche de rotor. Ces deux démonstrateurs m’ont permis plusieurs avancées. Le compactage maximum d’une part, la recherche fonctionnelle d’autre part. Le compactage pour réaliser un Moc très petit profite au Moc plus grand en ce sens qu’il libère de la place pour d’autres fonctions et pour l’ergonomie. L’aspect fonctionnel intervient dans l’intégration des commandes. La recherche a abouti à définir le projet et l’échelle. Je suis parti pour un BELL UH1 HUEY à l’échelle des figurines techniques. L’ensemble de l’ergonomie est étudiée pour ces figurines (position des commandes, garde au toit, etc.    Fiche technique : Dimension : *Longueur de la carlingue : 40cm *Longueur totale carlingue + queue : 80cm *Largeur de la carlingue : 20cm *Largeur hors tout avec treuil : 26cm *hauteur à la carlingue : 20cm *Hauteur totale : 28cm *Diamètre du rotor : 70cm Fonctions : *Commande de pas collectif, *Commande de pas cyclique, *Commande du pas du rotor anti-couple, *Toutes les commandes sont doublées, *Rotation des rotors motorisée, *Treuil motorisé, *Set de Leds, *Portières coulissantes à l’arrière avec partie battante, *Portières battantes à l’avant. Passons maintenant en revue les différentes fonctions et leurs réalisations. Je vous renverrai vers les topics de Flobaar et Technymind pour des explications exhaustive sur le fonctionnement d’un hélicoptère. En ce qui me concerne, le Moc intègre les notions de barre de Bell et de précession gyroscopique. L’ensemble des commandes a une action précédant le mouvement souhaité d’un quart de tour (principe de fonctionnement réel du huey). Alors, comment tout cela fonctionne-il ? Le pas des pales est réglable en tout point de façon cyclique et collective. Ci-dessous, l’explication de la mise en œuvre lego des différentes composantes de vol. Tout repose sur différentes considérations 1, la position du plateau cyclique est définie par trois points, dont deux fonctionnent de façon symétrique. 2. chacun de ces 3 points doit pouvoir évoluer collectivement (mouvement de translation verticale le long du mat du rotor) et cycliquement. Deux des trois points ayant un mouvement symétrique et le troisième est indépendant. Cela nous donne donc deux entrées de mouvement distinctes par point de fixation. « La réalisation des commandes est donc le point central du fonctionnement du Moc » Dans le principe, les commandes venant du manche sont répercutées sur la partie gauche d’un liftarm 5L, le collectif sur l’autre extrémité de ce dernier. Au centre de ce liftarm est fixé l’élément de suspension qui liaisonne le plateau cyclique. Cela est réalisé a trois reprises pour assurer la stabilité du plateau cyclique(PC) (3 points définissants un plan).Le mouvement transmis au PC est donc une moyenne d’une composante collective (identique pour les trois appuis) et d’un mouvement défini par le manche du cyclique. La répartition de ces mouvements tout autour du mat du rotor n’est pas une cynécure ! Afin d’assurer un bon maintien des commandes, le travail le plus délicat a été de faire en sorte que le coulissement vertical des bras de suspension maintenant le PC soit piloté, guidé et bloqué dans certaines directions. Il ne peut faire que monter ou descendre sur un axe, mais avec une rotule en partie inférieure pour absorber le décalage de plan du au basculement du PC. Sans cette articulation, rien ne fonctionne bien. Il reste ensuite à prolonger les entrées de cyclique et collectif vers les commandes dédiées en évitant au maximum tout jeu inutile. 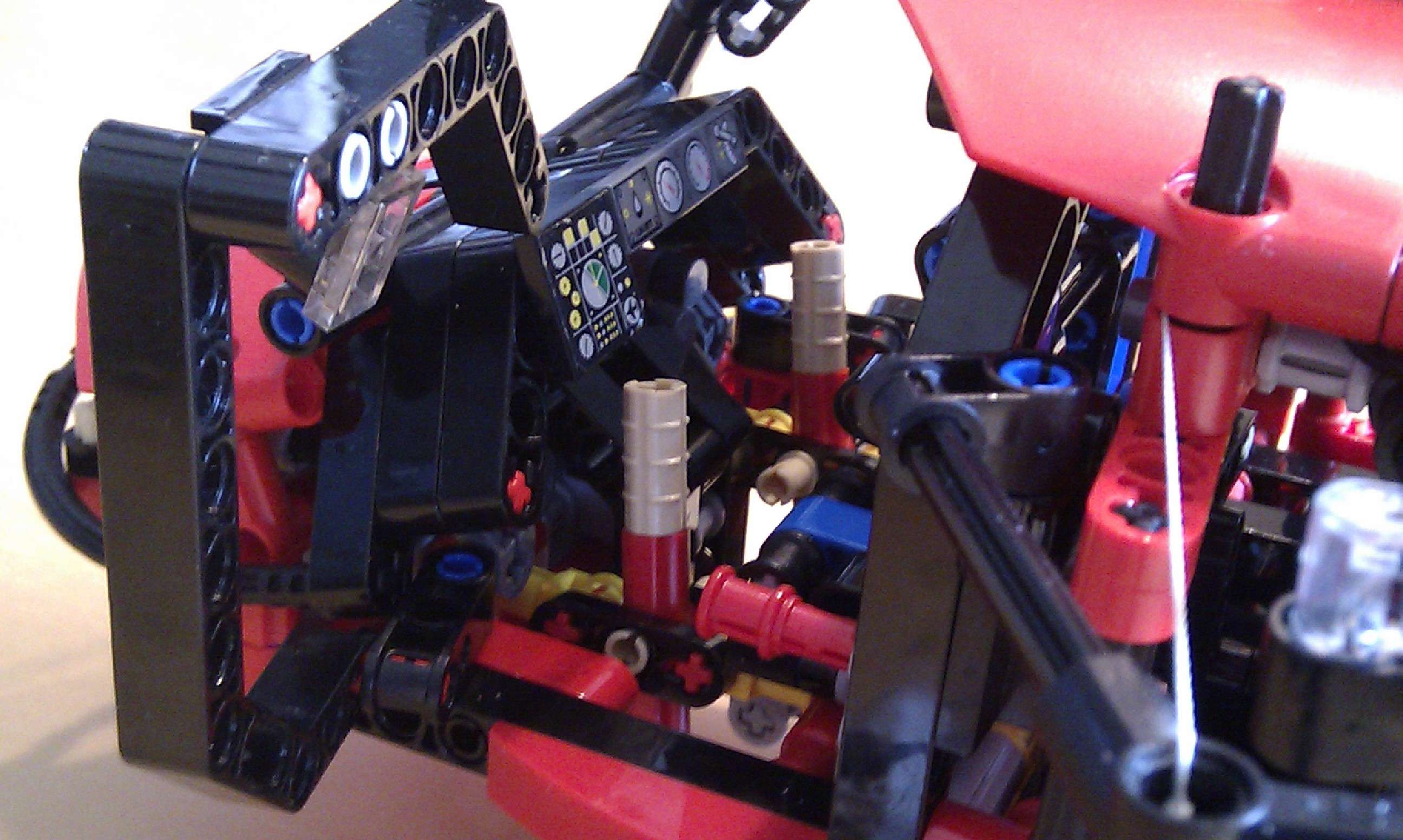 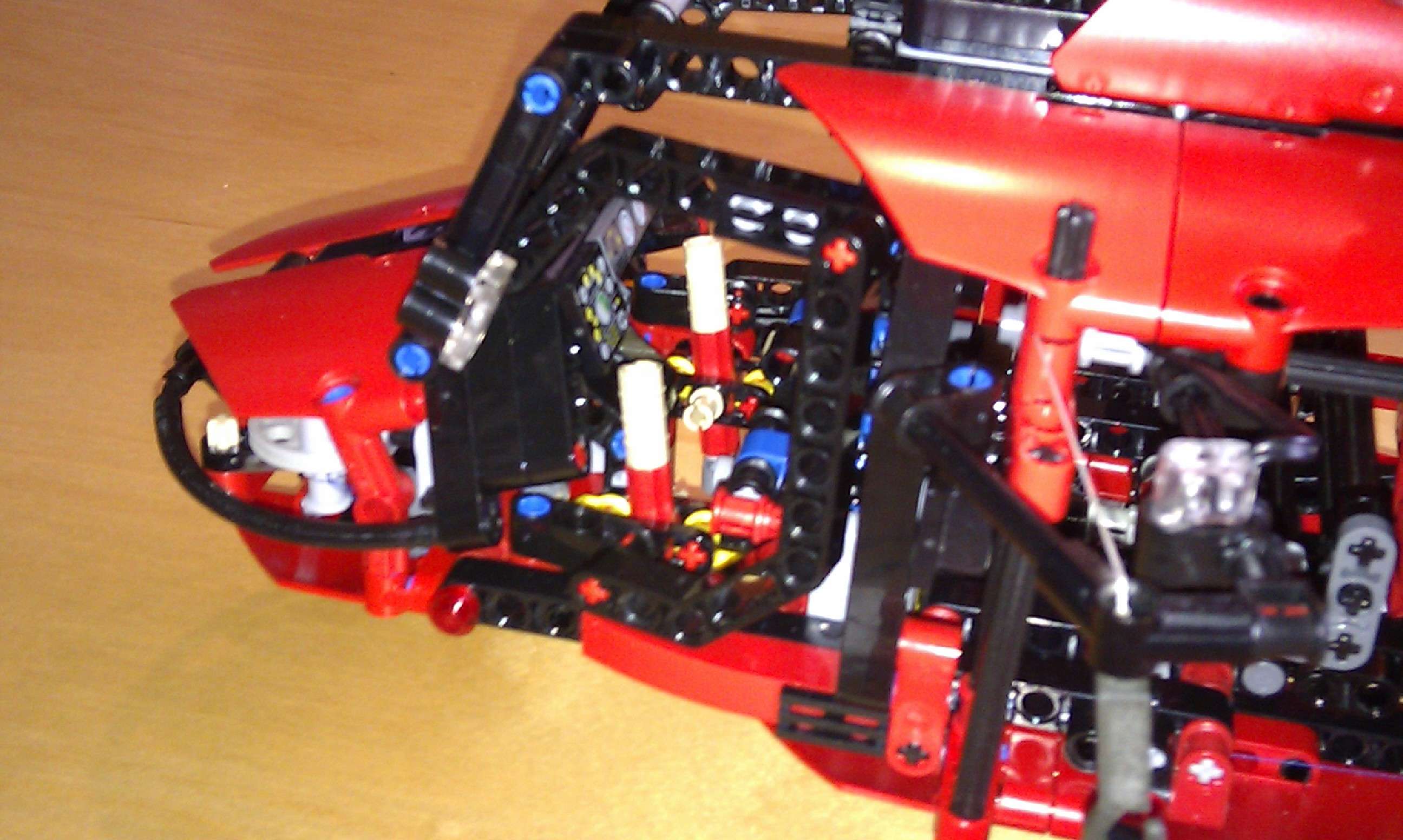 Cela c’est la théorie, car vient maintenant le temps de la mise au point. Chaque bras de levier a été ajusté en longueur en fonction du comportement dynamique en rotation du rotor. Et c’est la que cela se corse sérieusement ! En effet il faut prendre en compte toute la chaine de commande pour aboutir, in fine, a un mouvement de translation de 1T (en+ et en -) de débattement tant en cyclique que collectif. Donc, dans la chaine de commande, si un levier de 3L en actionne un de 4L il faut compenser quelques parts. La difficulté vient surtout du fait que je ne voulais a aucun prix avoir des éléments débordants ou inesthétiques de tout côté. C’est le principal défaut de mon premier démonstrateur. L’échelle du MOC faisant, j’ai du intégrer l’ensemble dans 3T de haut, en double, car deux pilotes et avec le palonnier dans le chemin…. Le Pas collectif : Au départ des commandes de pas collectif situées à main gauche des pilotes, un levier, liaisonnant les deux commandes, actionne une bielle longitudinale au fuselage et transmet un mouvement de rotation sur les côtés du mat du rotor. Le rehaussement collectif du point d’appui du PC à l’arrière est ‘repiquée’ sur la commande du collectif du bras situé à gauche de l’appareil. Ces trois entrées sont liaisonnées chacune a un côté du levier 5L qui fera la moyenne du mouvement entre cyclique et collectif pour chacun des appuis. 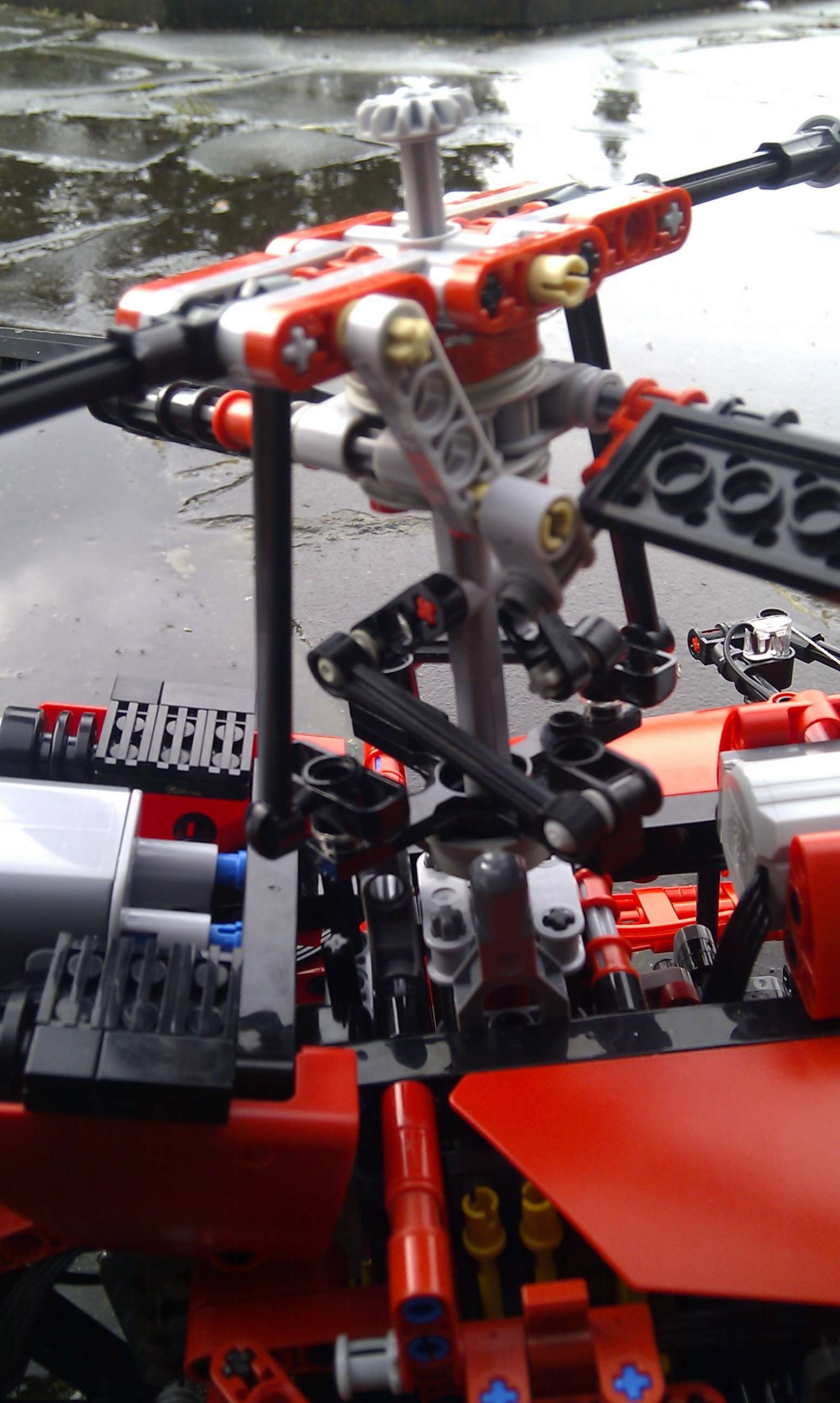 Le pas cyclique : Un manche à balais est installé pour chaque pilote. Le mouvement qauche/droite est synchronisé par l’avant, sous les commandes du palonnier Le mouvement enjambe l’axe du collectif à l’arrière des sièges pilotes et plonge à l’arrière vers le mat rotor ou un engrenage 12/12//12t splite le mouvement en deux composantes verticales opposées. Ces composantes sont liaisonnées aux entrées libres des liftarm 5L de ‘moyenne’. Le mouvement avant/arrière est transmis à deux bielles à rotules qui sont synchronisées au moyen d’un axe perpendiculaire vers l’arrière, sous la carlingue. Cet axe entraine une bielle parallèle a celle du collectif en partie inférieure et abouti à un engrenage 12t/12t à l’arrière du mat du rotor. Ce renvoi d’angle permet la connexion au liftarm de ‘moyenne’ arrière. Le mat du rotor : Est un élément sensible du Moc. La hauteur du fut du rotor pourrait aboutir à un axe mal maintenu, présentant beaucoup de jeu et aurait une influence néfaste sur les commandes. Le mat présente donc un point de fixation de l’axe rotor au plus haut possible, soit sous le PC dans sa position contraignante la plus basse. Le mat intègre également les fonctions de coulissement maîtrisé des pièces de maintient du PC, l’engrenage permettant la motorisation et le renvoi de la rotation vers le rotor de queue ainsi qu’une conception indéformable pour la rigidité de l’ensemble. L’ensemble du mat est réalisé en axes et connecteurs pour la partie interne et contreventé par des liftarms par l’extérieur. Les commandes se faisant entre les deux couches structurelles et la transmition étant interne au mat ‘primaire’. Alignement du plateau cyclique, des fusées des pales et de la barre de Bell :  Tous les éléments présent au dessus du point de rotation sous le PC sont libres de mouvement et sont contraints entre-eux par des dispositifs différents et adaptés aux mouvements à absorber/bloquer. Le plateau cyclique est liaisonné au mat de rotor au moyen d’un double compas d’entrainement monté a plat et constitué de deux barres a rotules fonctionnant a contrario dans un plans horizontal mais libre dans les deux autres plans. Le mouvement de rotation se transmet donc par poussée/traction dans l’axe des bras a rotules. Cela permet au PC tous les autres mouvements en collectif et cyclique. La barre de bell est libre également. Elle peut monter ou descendre grâce à un axle connector. Défaut de celui-ci il ne permet pas la transmission de la rotation. Ce sont les bielles de connexion des pales qui bloque le mouvement et entrainent indirectement la barre de bell. Tous ces éléments entrainant quelques contraintes de frottement, la chaine de commande a du être revue pour absorber l’effort au repos. Au repos, le fonctionnement est tout à fait satisfaisant, en rotation, par contre tout est hyper fluide. Le rotor de queue : Un palonnier est installé de façon ergonomique dans le nez de l’appareil. Il permet le mouvement des 4 pédales pour les pilotes et est le siège d’un mouvement de translation qui est transmis à un câble en circuit fermé. Le palonnier intègre également un élément permettant le réglage de la tension du câble. Le mouvement est ainsi transmis au fuselage arrière ou une bielle 4L transmet un mouvement de translation à deux guides enserrant une poulie. Celle-ci coulisse le long de l’axe du rotor de queue et permet l’orientation des pales du rotor. Afin d’éviter tout problème de désemboitement, les guides sont aux nombre de deux et les mouvements min et max présentent des butées tant au niveau du palonnier que du rotor. Les guides ne pouvant dès lors pas se trouver ‘outre-position’ Le treuil : Un treuil motorisé est intégré au Moc, fonctionnement hyper simple : moteur M liaisonné a un engrenage 12t/16t. L’enrouleur de câble est un driving ring détourné, et le clutch est mécanique puisqu’en bout de course l’axe moteur ayant (volontairement) été rallongé, l’engrenage débraye de lui-même. La motorisation : Un boitier a pile en plus dans un tel Moc n’est pas forcément simple. Esthétiquement il est discutable. J’ai néanmoins tenté une intégration plus douce avec quelques détails. Au niveau de la silhouette, c’est conforme au modèle de base. La rotation du rotor n’est pas hyper rapide mais bien suffisante et tout à fait démonstrative. Là ou cela a été plus délicat c’est dans l’équilibrage de l’ensemble. Un Moc technique n’est pas en acier et proportionnellement la BB pèse des tonnes. J’ai donc du ruser, décaler, alourdir un maximum l’avant du moc pour qu’il tienne su ces appuis et pour qu’enfin je puisse retirer le liftarm de stabilisation qui existait sous l’empennage jusqu’à récemment. Le design général : 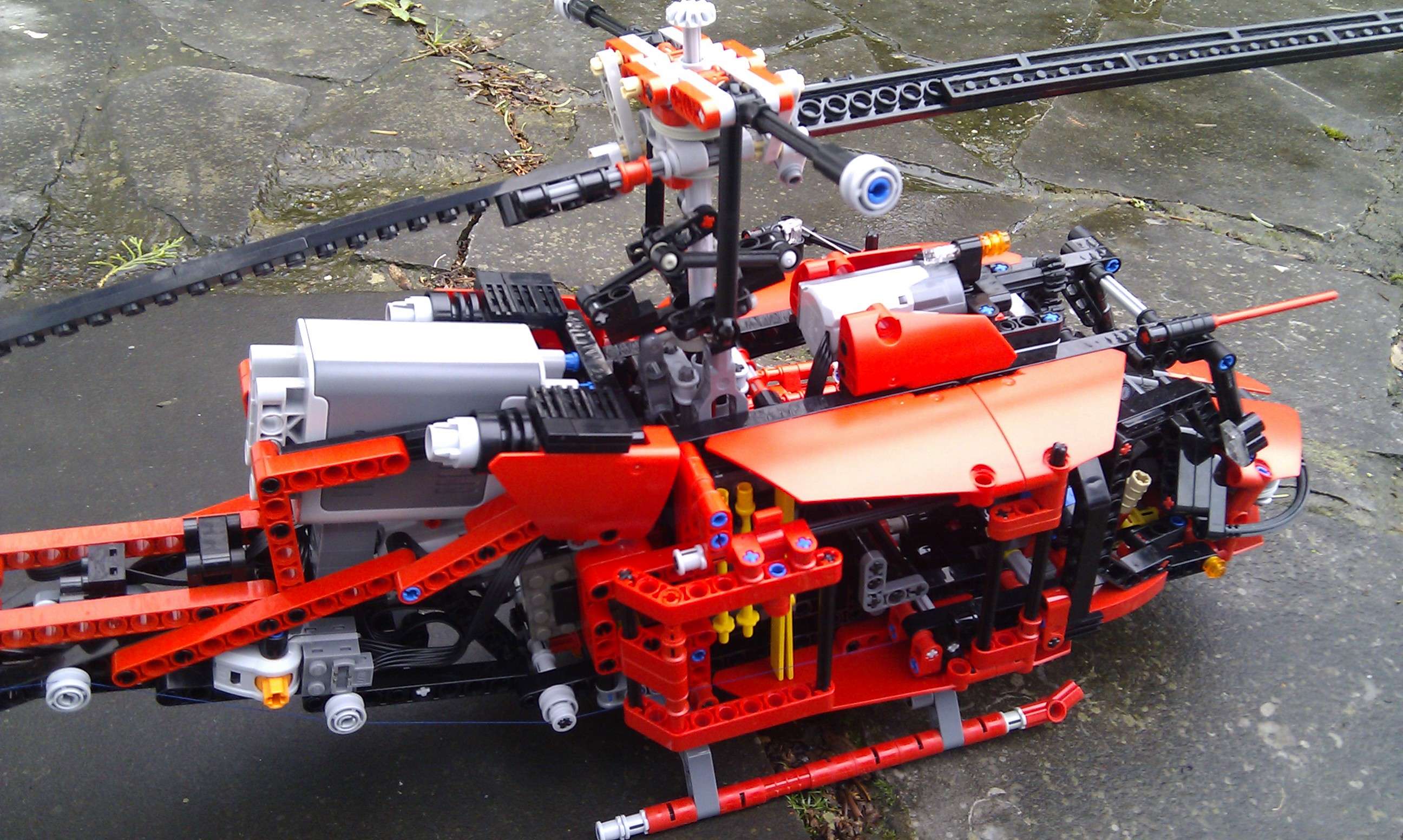 Les photos parlent d’elle-même, et je suis satisfait du résultat global. Les portières coulissantes et battantes + les quelques détails du type feux LED, nacelle de remontée, sièges, etc fonctionnent globalement bien d’un point de vue visuel. Pour les couleurs, encore du rouge, me direz-vous ! Mais l’achat complémentaire de pièces blanches, panels notamment, ne rentrait pas dans le budget. Notez que ce moc est pratiquement un one set moc de la 8070. Seules quelques pièces spécifiques on été rajoutées. Notez que par rapport aux derniers posts, les patins ont été revus, le poste de pilotage aménagé, une banquette rajoutée à l’arrière, et des capots moteurs positionnés sur les flancs de la BB.  Conclusions : Et bien en un mot :  Ou encore: ce fut l’expérience de loin la plus complexe jamais menée en lego, pour ma part, et ce Moc m’a apporté énormément de plaisir à concevoir. Un mythe est tombé, également, car cela faisait très, très, longtemps qu’il me trottait en tête. J’espère qu’il vous plaira. Pour la notice je ne promets rien, il faut énormément de temps pour cela et je n’en ai malheureusement plus, là tout de suite. A+ La vidéo finale bientôt en ligne. Si vous souhaitez d'autre photos n'hésitez pas a demander! A+ Dernière édition par steph77 le Mer Fév 15, 2012 11:43 pm, édité 1 fois au total.
|
Retourner vers Vos MOCs Technic
Qui est en ligne ?
Utilisateurs parcourant actuellement ce forum : Aucun utilisateur inscrit et 41 invités