

Dans le cadre d'un stage je dois modeliser 2 types de spectrometres a neutron qui sont utilises dans mon institut, les trois axes et les temps de vol (TAS et TOF).
Il faut savoir que les neutrons sont absolument geniaux en comparaison des autres methodes aux rayons X car les neutrons penetrent sans probleme dans la matiere sans la deformer et nous donnent des informations ultra precises sur des mollecules (cristaux, polymeres ...). Le spectrometre est donc l'appareil qui va balancer des neutrons sur un echantillon (crisaux ...) et qui va recolter les infos ( deviation des neutrons, variation de leur energie ...) qui sont donc traites pour nous donner les infos que l'on veut sur l'echantillon. Le seul probleme, c'est que pour avoir des neutrons, il faut un reacteur nucleaire et donc ca coute tres chere.
Voila mon projet est donc un projet de vulgarisation qui va etre ensuite utilise dans les show room des centres neutroniques et pour des evenements comme la fete de la science.
Concretement un spectrometre de base est compose de plusieurs parties moblies :
Monochromateurs qui va nous permettre de selectionner tel ou tel type de neutron.
Collimateur qui va permettre d'avoir un flux droit ! ( les netrons ne se baladent pas partout dans un flux)
Choppers (Fermi) qui va nous transformer le flux continu en pulse ( utiliser dans le TOF Time of Flight)
Le support du sample.
L'Analyser qui va nous permettre de selectionner les neutrons qui nous interessent a la sortie du sample
Le detecteur qui nous donne les infos des neutrons qui foncent sur lui.
Question 1 :
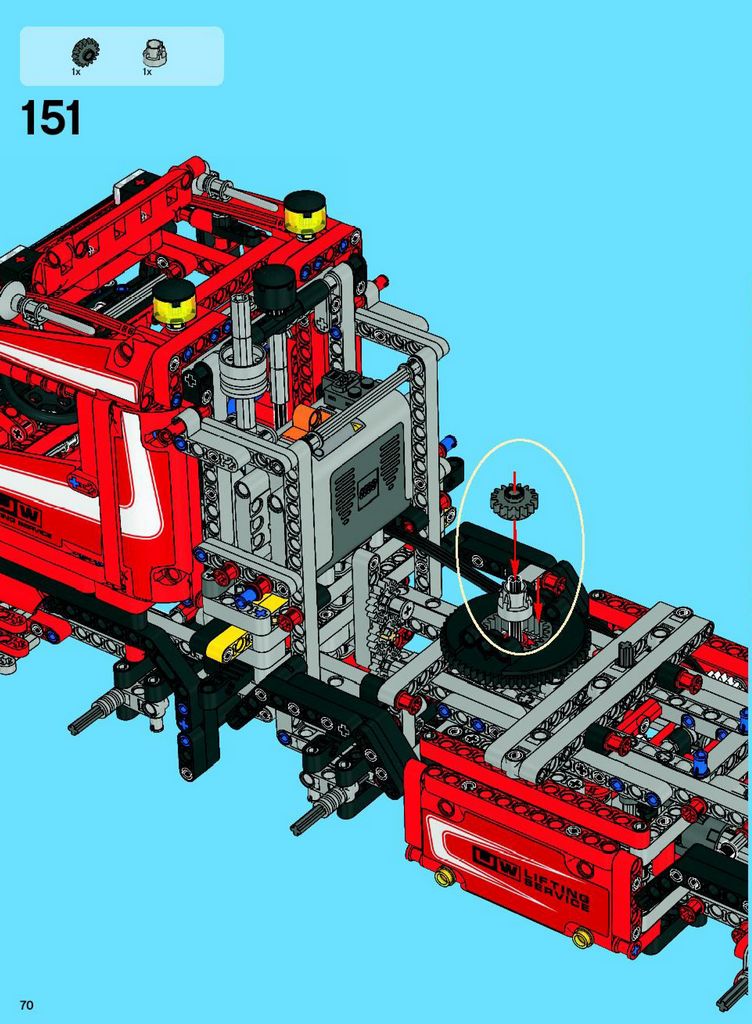
Mon moteur NXT doit mettre en rotation une lourde charge (disons, les 2 autres moteurs + pas mal de brique). Cette rotation s'effectue sur un plan (donc une table disons). Je voudrais surelever ma partie en rotation et mettre 2-3 liaisons ponctuelles en dessous histoire de supprimmer les frottements et surtout d'aider le moteur,
Ce que j'entends par liaison ponctuelle est en fait une bille qui serait en contact avec la table et libre en rotation donc une sorte de couvercle viendrait dessus l'empechant de partir ...
L'image suivante n'est pas vraiment ce que je voudrais car il n'y a pas le capuchon, a la place il y a une tige qui est collee a la bille ce qui empeche la libre rotation que je veux.
Pensez-vous que ce que je veux soit trouvable chez lego ? Sinon, avez-vous une autre idee ?
Merci par avance.


.gif ";)")
.gif ":)")























{kind=link}