




Pour rappel, l'objectif du GG#001 était de créer un moc fonctionnel, tout en gardant une mécanique similaire au fsb#001. A juste titre, je considère que c'était une 'copie' du fsb#001. Néanmoins, du fait de ce choix, le GG#001 reste mécaniquement très complexe. Le problème majeur de ce modèle est la fragilité des essieux, qui fait que les roues présentent souvent un angle de carrossage important et ont du mal à rester perpendiculaire au châssis en mode skid steer. Avec l'arrivée des nouveaux moyeux sortis sur la formule1 , j'avais l'envie de créer une nouvelle version pour corriger ce problème.
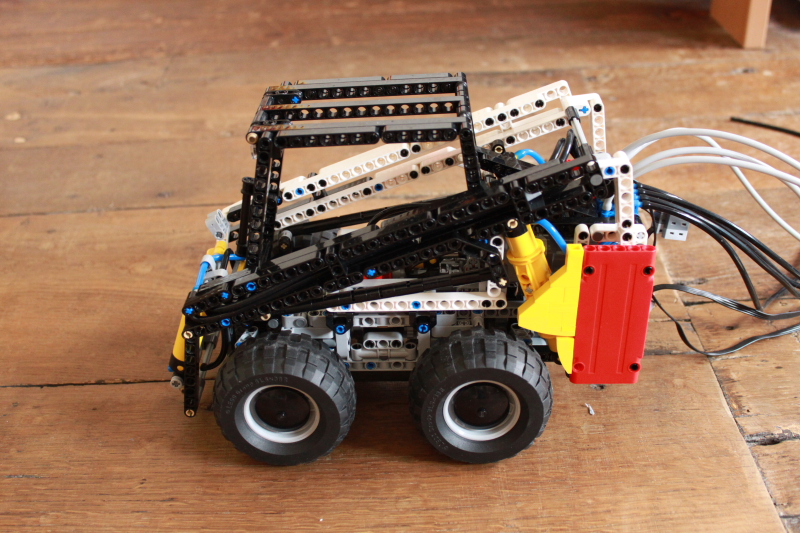
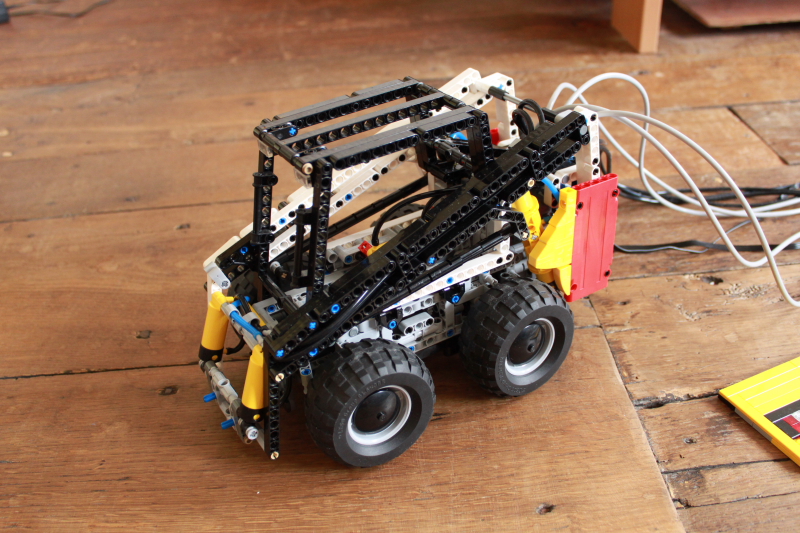
Cette version se veut plus simple, plus fiable, plus fonctionnelle et plus esthétique que la présente ( oui, rien que ça
 ). C'est encore un WIP à l'heure actuelle.
). C'est encore un WIP à l'heure actuelle.

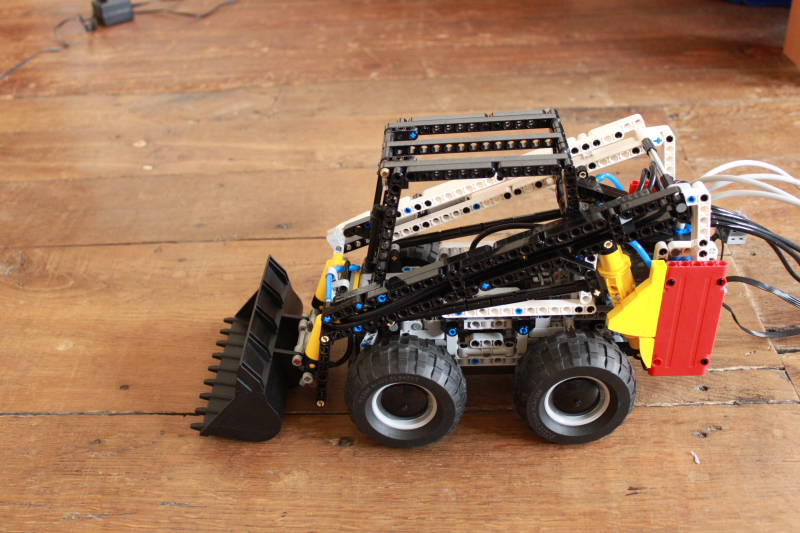
Comme vous le voyez, la mécanique est extrêmement simplifiée. Il n'y a plus de différentiel central (car inutile puisque les deux essieux sont directeurs). Je n'utilise plus que deux boîtes de vitesse à la place de 4 sur le modèle précédent, ce qui réduit la friction dans la chaîne de transmission.
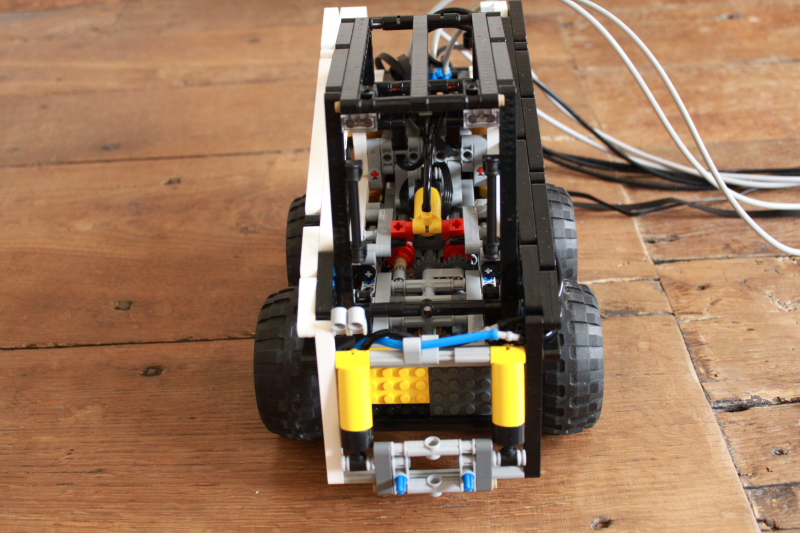
Vous aurez peut-être remarqués le renvoi d'angle au centre du châssis et vous demandez peut-être à quoi il peut servir. En fait, il sert juste à changer le sens de rotation de l'axe de sortie BV de telle sorte que les renvois d'angle qui amènent le mouvement jusqu'aux 24 puissent être construits du même côté (bien plus solide).


Le modèle utilise désormais des moteurs L, pour faciliter la construction du châssis d'une part mais également parce qu'ils sont plus coupleux que les moteurs M.
En mode skid steer, le moteur L de gauche propulse les deux roues gauches et le moteur L droit, celles de droites. Les deux différentiels peuvent tourner librement. En mode all wheel steer, le moteur L de gauche entraîne les 4roues tandis que le moteur droit, n'entraîne rien du tout. En effet, la direction est reliée à un servo-moteur. Pratique : quand il n'est pas actionné, les roues sont bien perpendiculaires au châssis et la direction est bloquée : plus besoin d'utiliser un mini-vérin à cet effet.
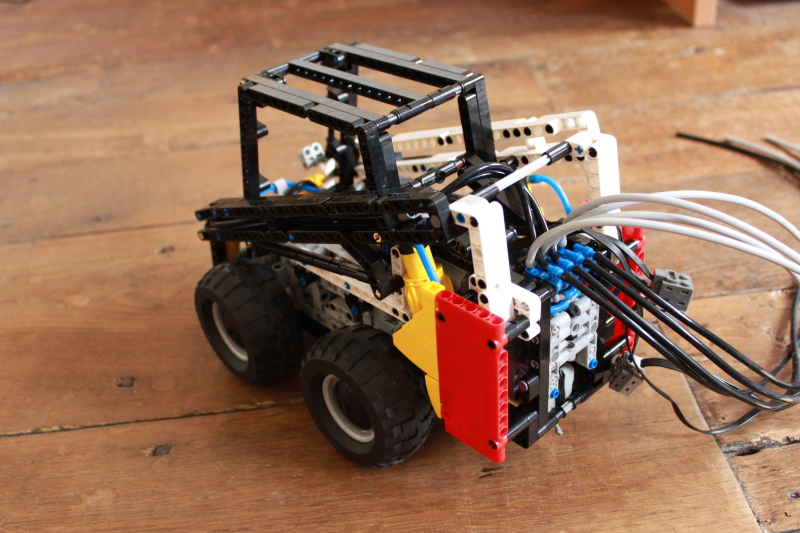
Le problème est que je ne voulais pas ajouter un joystick supplémentaire sur la télécommande pour actionner ce moteur, il a donc fallu ruser. Comme vous le voyez, un vérin pneumatique s'assure du changement de mode en poussant ou tirant les chang over catchs. Mais ce vérin pneumatique est également connecté à un switch électrique. Sur la prise du switch électrique : le servo-moteur. Et ce switch électrique ainsi que le moteur L de droite sont tous les deux connectés sur la prise d'un autre switch électrique : celui de la télécommande. En mode skid steer : le switch électrique du modèle est fermé : celui du joystick contrôle uniquement le moteur L de droite. En mode all wheel steer, le switch électrique du châssis est ouvert et celui du châssis contrôle à la fois le servo-moteur pour la direction et le moteur L... mais puisque la sortie de la boîte de vitesse de ce moteur n'est raccordée à rien dans cette position, le moteur tourne dans le vide et n'influe plus sur le fonctionnement du modèle !

De part l'utilisation des nouveaux moyeux, il y a encore un effet ackermann inverse mais je ne peux rien y faire et comme le modèle sera beaucoup plus léger, je pense que ça ne se remarquera même pas.
Je vous rappelle que c'est un prototype donc plein de choses vont encore être changés. Je vais commencer à travailler sur le design, avant de construire la deuxième version, optimisée, puis surement une troisième. La couleur du modèle sera cette fois-ci blanche, pour ressembler vraiment à un bobcat et le design sera bien plus soigné que ma version précédente ( j'ai beaucoup plus de place disponible avec cette mécanique simplifiée).
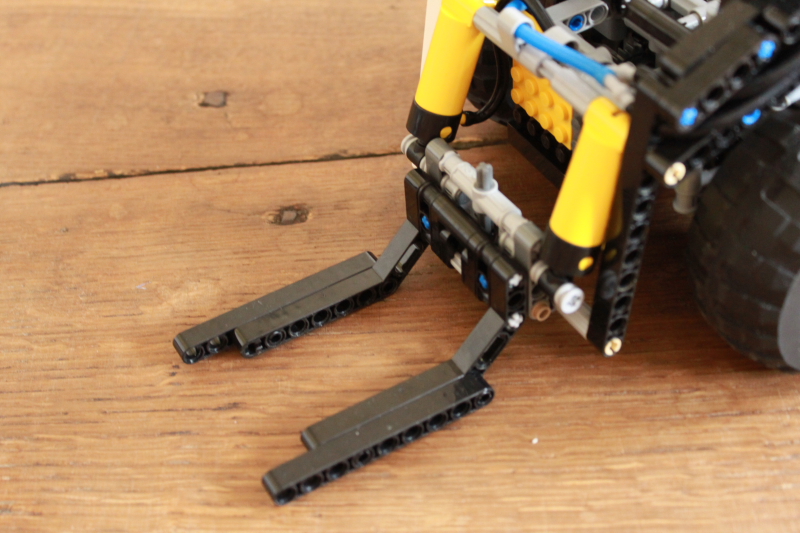
Concernant la circuit pneumatique, je pense intégrer une prise d'air annexe sur le bras pour contrôler d'autres outils ( il y en a une flopée sur le site de bobcat)- ce qui sous-entend que je vais en construire quelques un. J'aimerais bien réaliser une attache-rapide mécanique( pneumatique serait encore mieux, comme ça elle serait contrôlable à distance) mais il faut voir si j'ai la place.
Concernant la télécommande, un seul moteur se chargera de fournir l'air pour toutes les fonctions pneumatiques et il y aura un système d'auto-stop.
Voilà, vous savez désormais sur quoi je suis en train de bosser en ce moment
.gif ":)")



.gif ";)")









 Beau travail.
Beau travail.


 C'est bon, les voilà, j'ai réglé un paramètre sur mon PC.
C'est bon, les voilà, j'ai réglé un paramètre sur mon PC.





 qu'as tu fait ?
qu'as tu fait ?