

Malgré l'heure tardive (et le fait que je sois nouveau sur le forum) je me lance:
Je réalise dans le cadre de mon TIPE (sorte de "TPE" version classe prépa
 ) une étude de l'asservissement du Segway. N'ayant pas vraiment les moyens de m'en procurer un j'ai eu la chouette idée d'en construire une maquette avec un kit de Lego Mindstorms et un capteur gyroscopique trouvé sur le net. (http://www.hitechnic.com/models)
) une étude de l'asservissement du Segway. N'ayant pas vraiment les moyens de m'en procurer un j'ai eu la chouette idée d'en construire une maquette avec un kit de Lego Mindstorms et un capteur gyroscopique trouvé sur le net. (http://www.hitechnic.com/models)Avant qu'on me pose la question je précise que je n'ai pas pris en compte le récepteur infrarouge dans ma maquette n'ayant pas besoin de téléguider mon robot pendant l'expérience.
Justement, je m'explique un peu à propos de l'expérience que je souhaite réaliser: le robot sera placé sur un banc d'essai (une plateforme six axes en labo de SII permettant d'imposer l'inclinaison du support via un PC) et l'idée est de récupérer les données du gyroscope pendant l'expérience afin de pouvoir les analyser et grâce à un logiciel dédié d'obtenir un modèle de la fonction de transfert du système.
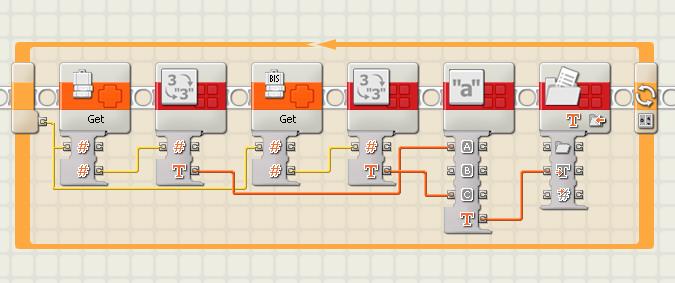
Seulement voilà, le robot et le programme disponible sur le site hitechnic fonctionnent nickel mais lorsque j'injecte dans le programme original le bloc visant à acquérir les données du capteur (j'utilise comme interface la version Education du logiciel lego Mindstorms) le robot ne parvient plus à se stabiliser, et d'après ce que m'a expliqué (en anglais) le mec du support technique du site hitechnic, c'est parceque la commande d'écriture du log ralentit l'ensemble du programme. Du coup les calculs de réajustement dans la boucle d'asservissement ne se font pas assez rapidement et ne permettent plus le maintient du robot à la position verticale...
Connaissez vous un quelconque moyen d'obtenir les données du gyroscope pendant l'exécution du programme sans risquer de ralentir les calculs ?!
Voilà c'est un peu long j'espère que ça n'en découragera pas certains de lire !
Je suis ouvert à toutes les propositions (pour ma part je suis un peu à court d'idées) et j'espère que la communauté de NXTistes saura m'aider à trouver une solution à ce problème qui paralyse un peu mon travail...
Merci d'avance !
PS: petite précision, je ne connais rien à la programmation "pure et dure"





.gif ";)")





 ) :
) :








 ). Il semble que ce soit le simple array qui vire les décimales.
). Il semble que ce soit le simple array qui vire les décimales.