semtou a écrit: J'ai l'impression que tu as mis de l'affichage pendant le déplacement... NON ? C'est le capteur US (ultra son) qui localise le verre (c'est pour cela que tu l'as décalé de l'axe) ? En tous cas bravo. voila un qui en jette au bar .
Il n'y a pas d'affichage pendant le déplacement. Le capteur US est là pour surveiller la proximité d'un mur ou d'un gros objet en arrière plan. Il est sans effet pour cet exercice. Le déplacement vers le gobelet est fixé au départ par un nombre de tours.
A+ Roboleo " Je ne cherche pas, je trouve…" P. Picasso
Alors je vais vous présenter ma pince, mais avant une remarque sur le programme de Semtou car il y a un point à améliorer : Tu choisis une vitesse pour le moteur (setspeed(200)) et cela pose un problème quand la pince arrive en butée. En effet la régulation de vitesse va augmenter la puissance au moteur s'il est contraint. Cela va forcer sur la butée (ok la tienne est solide). J'ai utilisé la fonction setPower(20) pour réduire la puissance du moteur. Cela permet d'arriver en butée sans forcer sur la mécanique. (il faut inhiber la régulation avant, voir dans mon code).
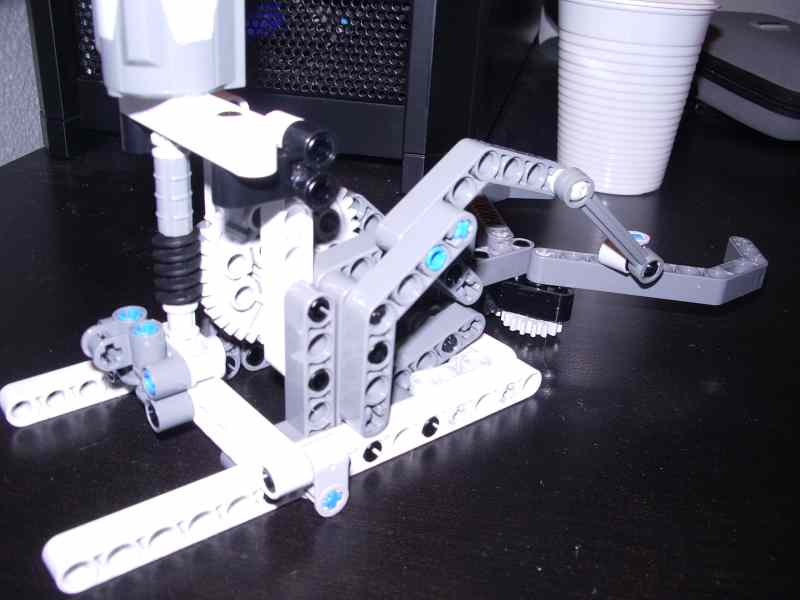
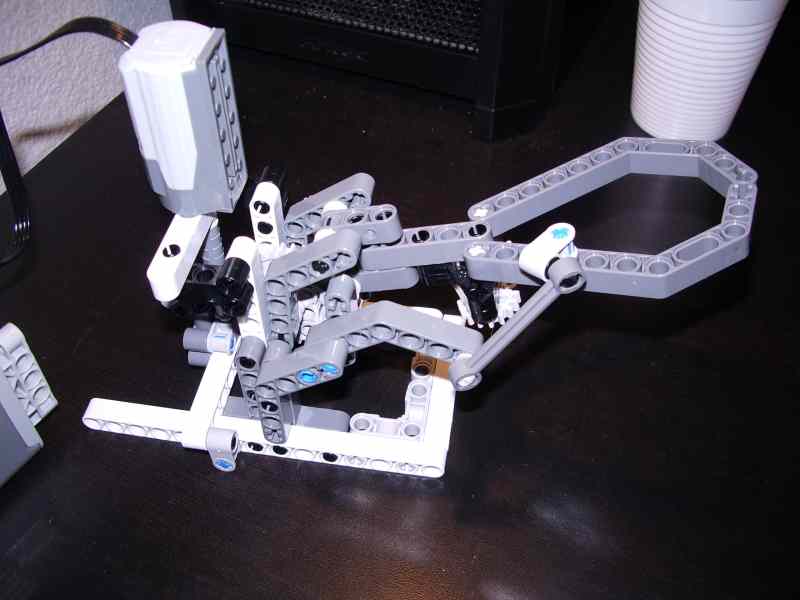
Pour en revenir à ma pince, contrairement aux vôtres elle est énorme. J'ai repris un montage par engrenages que j'aime bien car il donne plus de puissance au serrage qu'à la levée. (Et surtout je suis nul en leviers, rotules, biellettes, ...)
Je me suis limité aux pièces du kit éducation mais je pense qu'on aura plus de briques à fribot au vu des photos sur leur site.
Pour le programme comme expliqué plus haut je limite la puissance du moteur et j'utilise des butées mécaniques. En usage autonome la commande du moteur sera basée sur une durée de rotation et non un angle. J'ai aussi testé la gestion du clavier du NXT avec Button.readButtons qui n'est pas bloquant (le prog continue de s'exécuter qu'il y ait ou pas un bouton appuyé). C'est l'exemple BlueStats fournis qui me sert de base pour compiler mon programme.
Comme le montre la vidéo il faut rester appuyé sur le bouton pour alimenter le moteur, le bouton orange permet de modifier la puissance.
Oui c'est niquel armel, ta pince à une vitesse vraiment sympa et une bonne amplitude. Toi aussi alban c'est sûr elle est asses large pour prendre une bouteille avec le gobelet mais j'aime bien l'idée qu'il vaut mieux ratisser large ça pourrait être un atout pour la suite . C'est agréable de voir votre travail et surtout vos programmes. Chacun son approche c'est très bien. A +
public class ClawTest_main { public static void main(String args[]){ Pilot pPilot = new Pilot(5.6f, 12.9f, Motor.A, Motor.C, true); pPilot.setSpeed(100); pPilot.regulateSpeed(true);
try{ Button.ENTER.waitForPressAndRelease();
Motor.B.setSpeed(50); Motor.B.smoothAcceleration(true); Motor.B.resetTachoCount(); Motor.B.backward(); while(Motor.B.getTachoCount() != -45){;}//releve la pince Motor.B.lock(50);
Thread.sleep(1000);
pPilot.rotate(60);
Thread.sleep(1000);
Motor.B.resetTachoCount(); Motor.B.forward(); while(Motor.B.getTachoCount() != 45){;}//baisse la pince Motor.B.stop();
Super ta pince Thibaud, elle a un super look technic et pour le gobelet pas de problème si tu bois pas Je comprends mieux maintenant la largeur de la voie de ton robot A +




qui en jette au bar
.
.gif ";)")







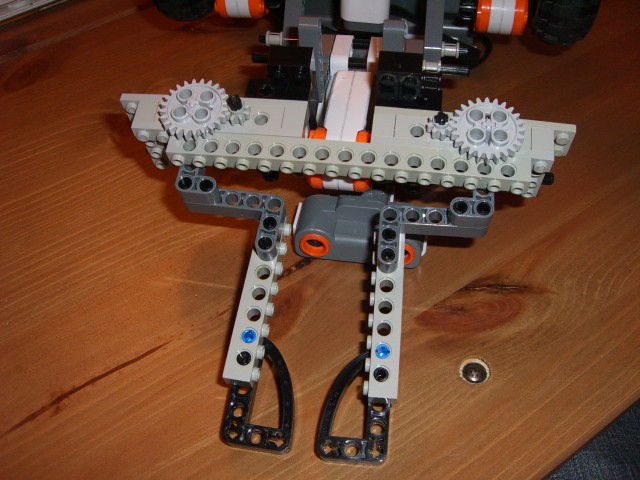











 Je comprends mieux maintenant la largeur de la voie de ton robot
Je comprends mieux maintenant la largeur de la voie de ton robot 



 But bring in your MOC anyway
But bring in your MOC anyway 





.gif ":)")