



J’ouvre cette section, car les choses que j'ai à vous présenter ne méritent pas d'être dans la rubrique "vos mocs" mais plutôt ici.
Mon but est de centralisé tout les préhenseurs, utiliser dans nos mocs ou juste développé pour la partie théorique.
Je vois fleurir de plus en plus sur le forum, des petits projets de bras robotisés, de robots équipés de pinces ou même de bras.
Pour débuter la section, je tiens à vous présenter : SAF => Self Adaptative Finger
SAF est un doigt qui possède 2 degrés de libertés, qui n'utilise qu'un seul actionneur.
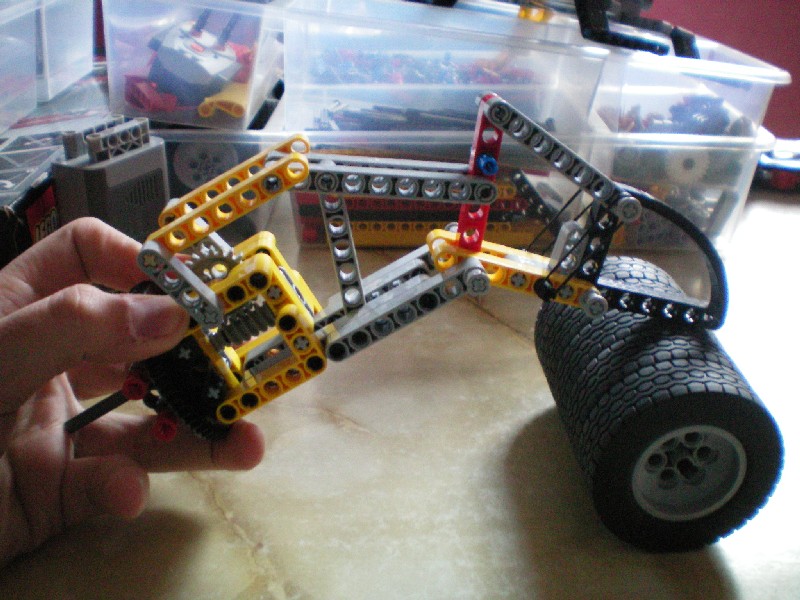
présentation du model géométrique simple
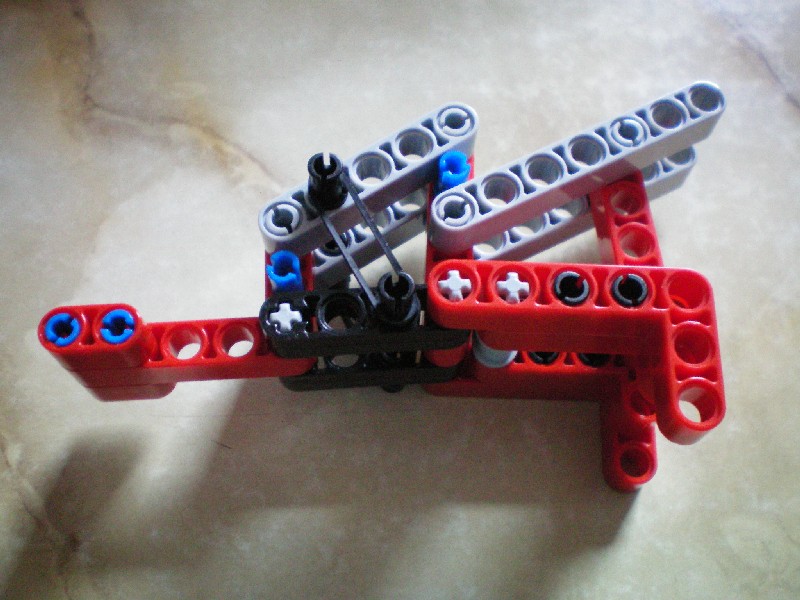

en action sur un support dur
comme on peu le voir, le mouvement et transmis entre les phalanges par les poutres grises (que je pousse avec mon doigt)
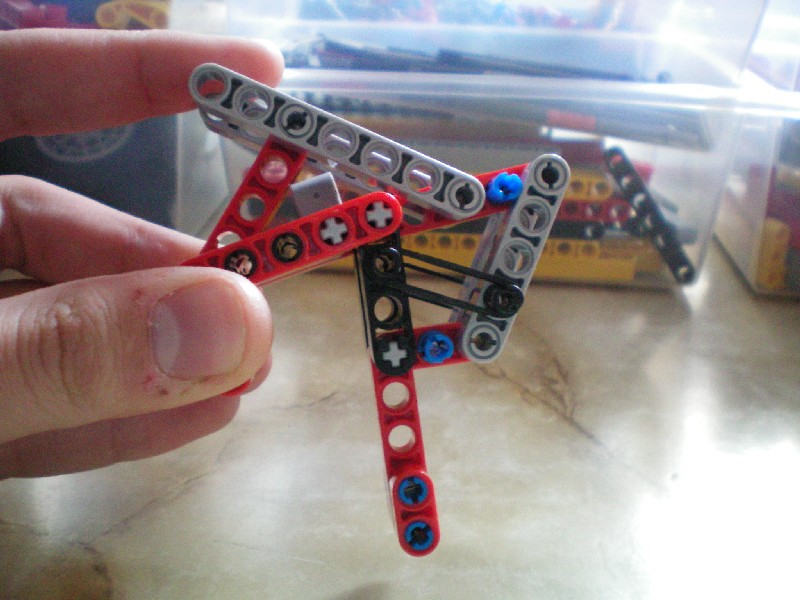
Si l'objet est en appui sur le bout du doigt, alors toute la force et transmise vers celui ci.
Si l'objet est en appui sur la phalange, alors il est possible de fermer encore plus le doigt.
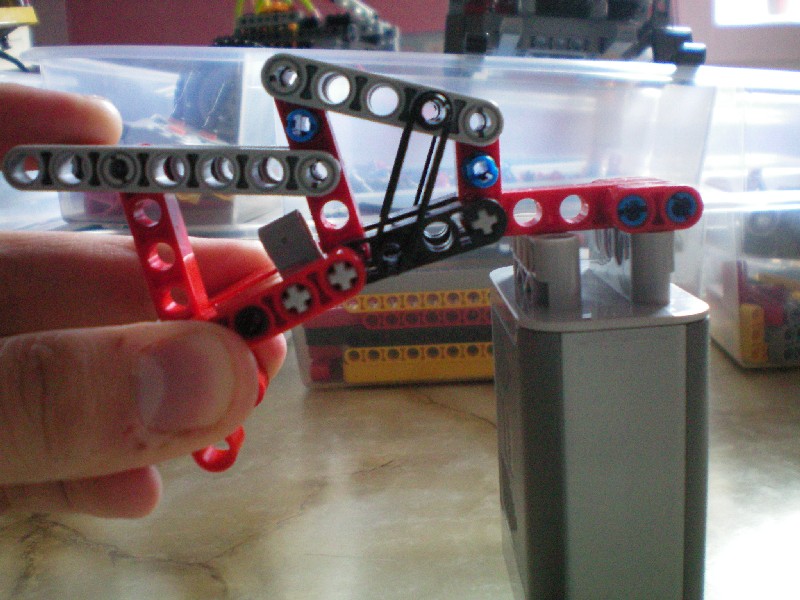
SAF plie l'extrémité.
Toute la force s'exerce alors pour tenir fermé le doigt.
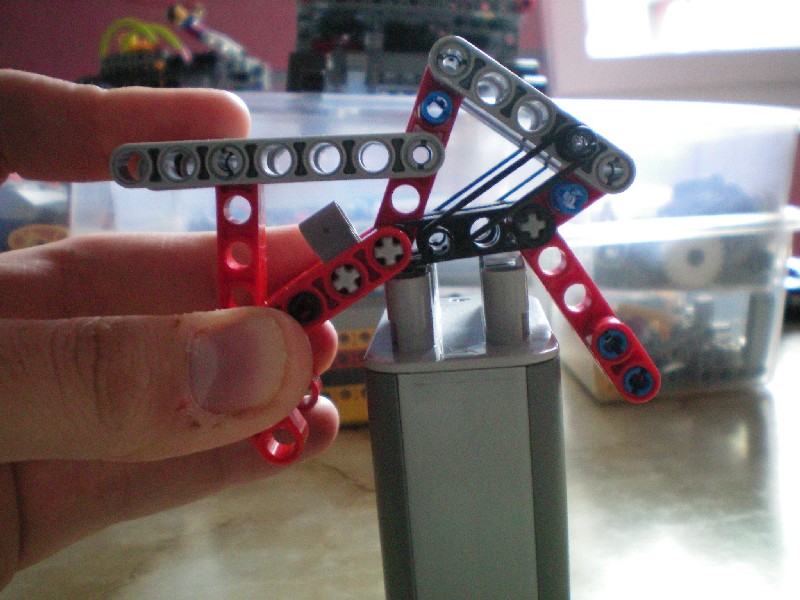
un autre exemple de doigt SAF (un peu plus gros)



Voilà, a vos contributions et vos remarques pour développer d’autres préhenseurs.


.gif ";)") .
.

 bonne référence joebar67.
bonne référence joebar67. 

.gif ":)") .
. .
.
 , tu bosses sur quoi ? ( MP de préférence pour ne pas pourris le topic
, tu bosses sur quoi ? ( MP de préférence pour ne pas pourris le topic  . C'est vrai que la robotique est très passionnante . Ta collection attire ma curiosité
. C'est vrai que la robotique est très passionnante . Ta collection attire ma curiosité 