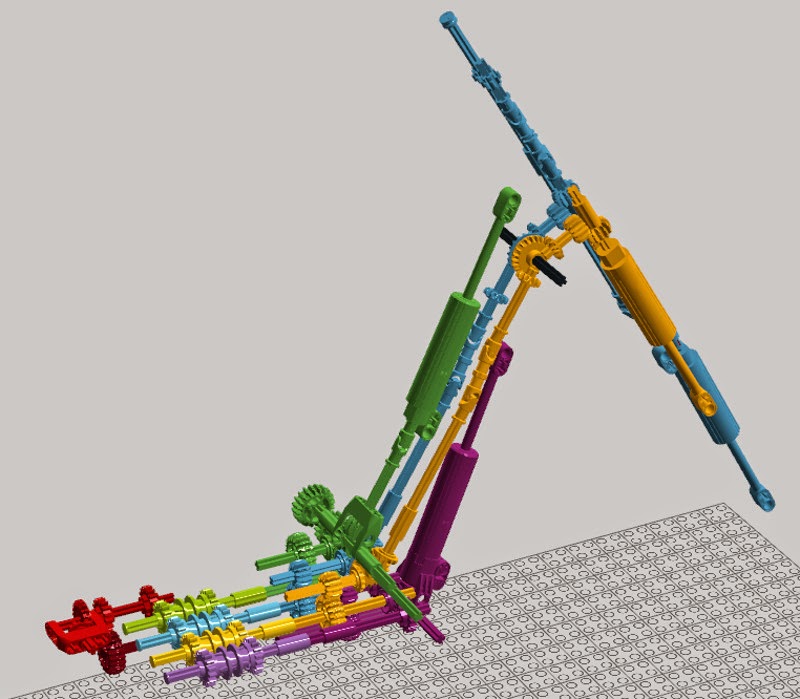
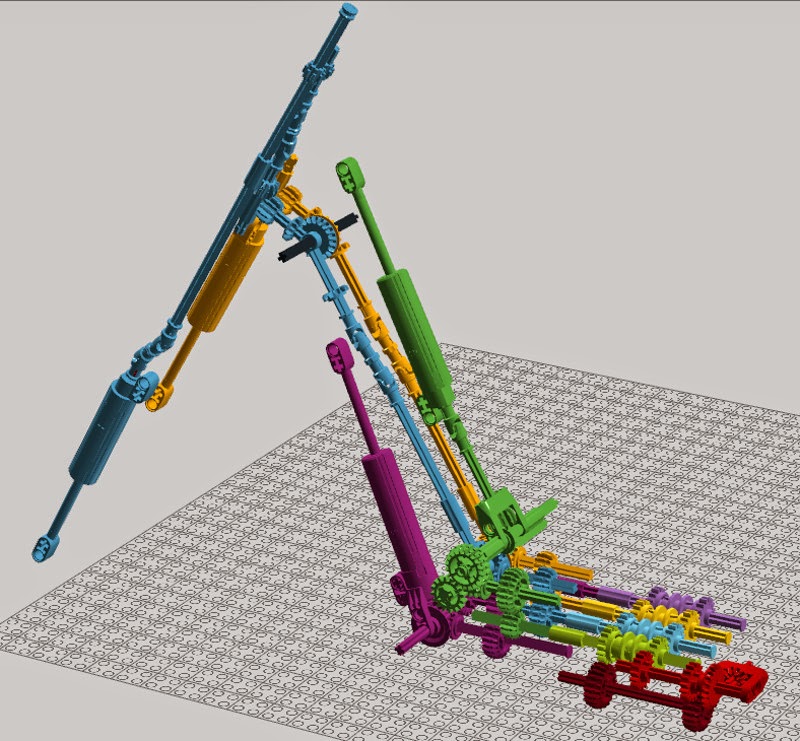
Je vous présente mon Moc pour ce concours 25. Il s'agit d'une pelle araignée avec une tourelle rouge. Le châssis est DBG et les jambes sont LBG. Les roues utilisées sont celles de l'Unimog. Le godet est fait maison.
J'étais parti sur full RC PFS; finalement j'ai abandonné, trop lourd...Finalement, j'en ai gardé le bras, les jambes, ce qui explique les dimensions.



Les fonctions sont au nombre 8 ( plus la rotation de la tourelle, mais bon, une turntable...) :
-Jambes avant orientables, avec stabilisateur et levage du châssis
-Direction sur les jambes arrières.
-Rotation de la tourelle
-4 fonctions sur le bras : levage, articulation, allongement, godet. Les fonctions sur le bras sont actionnées par 4 LAs
Le châssis est full manuel, tandis que les fonction de la tourelle sont en PFS, j'ai utilisé un moteur L.
Châssis :

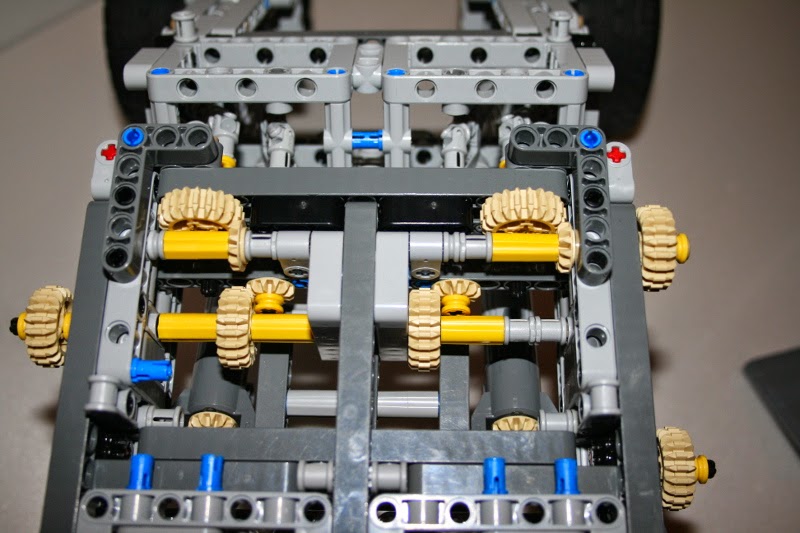
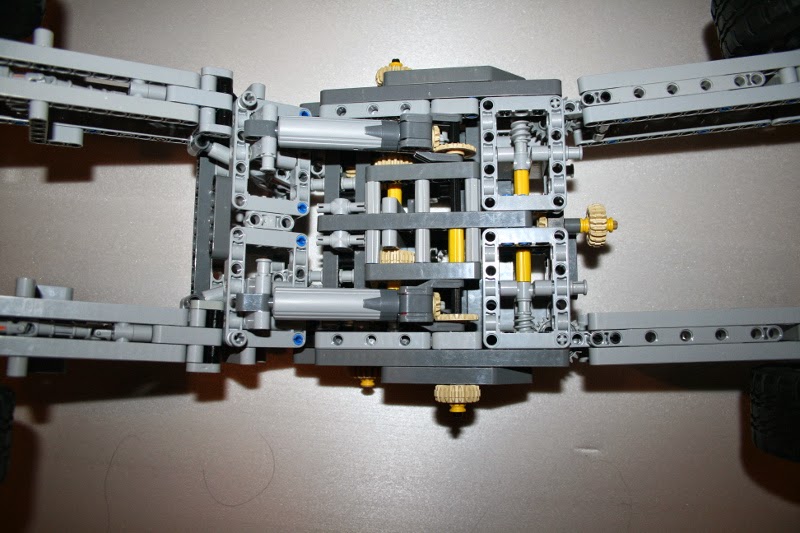
Direction sur les bras arrières :
La direction se manipule depuis la 20 T située entre les jambes arrières. En renvoi d'angle 12/20 pour envoyer le mouvement à gauche et à droite sur une vis sans fin. Cette vis sans fin actionne une 24 T, solidaire de la jambe. Ainsi, toute la jambe s'oriente.
Pour les bras avant, toutes les fonctions sont liées.
Stabilisateur des bras avants :
Pour cette fonction, on actionne une 20 T du châssis (à l'avant droit, haut). Un renvoi d'angle 12 T / 20 T permet d'envoyer le mouvement dans l'axe du véhicule. Un couple 20 T / 12 T permet de descendre le mouvement de 3 tenons, au niveau de l'articulation des jambes avant. Un cardan permet de passer l'articulation de levage et un second permet la rotation de la jambe lors de l'écartement des jambes. On chemine dans le bras, puis le mouvement arrive sur un mini-LA. En déformant un parallélogramme, on obtient un stabilisateur robuste.

Écartement des bras avants :
Pour cette fonction, on actionne une 20 T du châssis (côté gauche). Un renvoi d'angle 20 / 12 T permet d'envoyer le mouvement dans l'axe du véhicule. Un cardan permet de passer l'articulation de levage. Le mouvement arrive sur un mini-LA, qui pousse (ou tire) sur le bras.
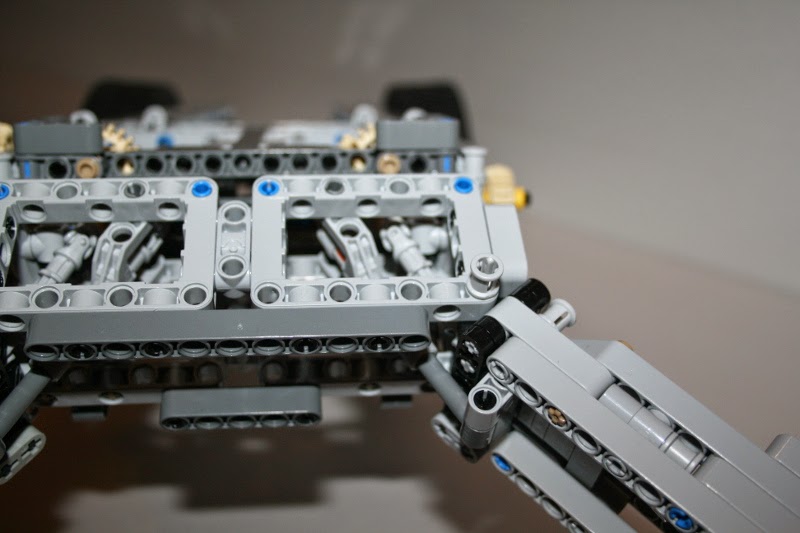
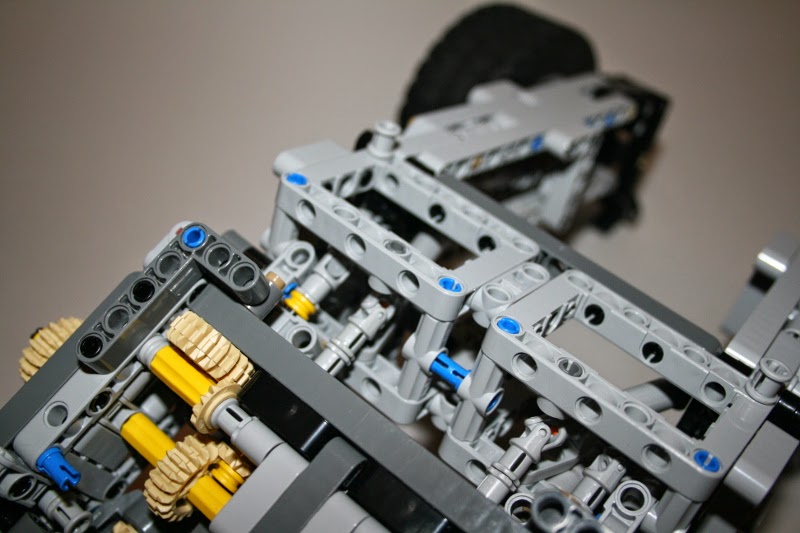
Levage du véhicule :
Pour cette fonction, on actionne une 20 T du châssis (à l'arrière droit, bas). Un renvoi d'angle 20 / 12 T actionne un LA (un pour chaque côté). Les 2 bras sont fixés sur une "cage" et c'est toute cette cage qui bascule quand les LAs sont en mouvement. Cette cage permet de limiter les efforts sur les articulations
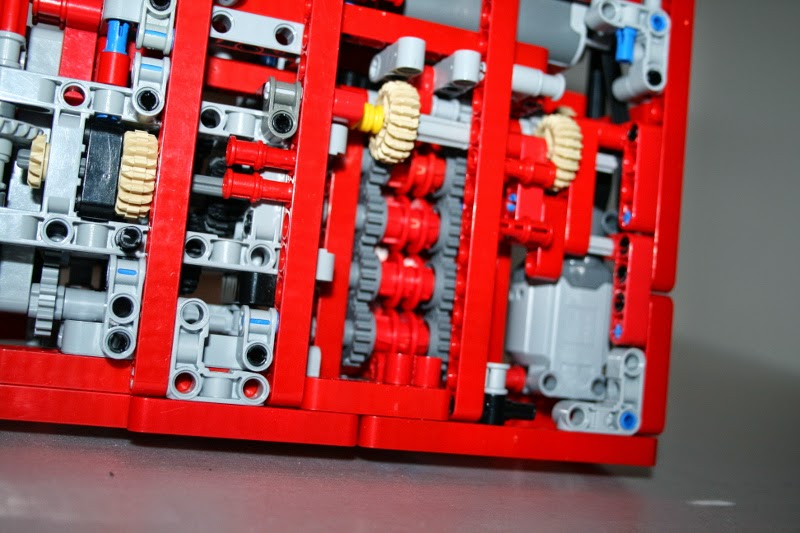
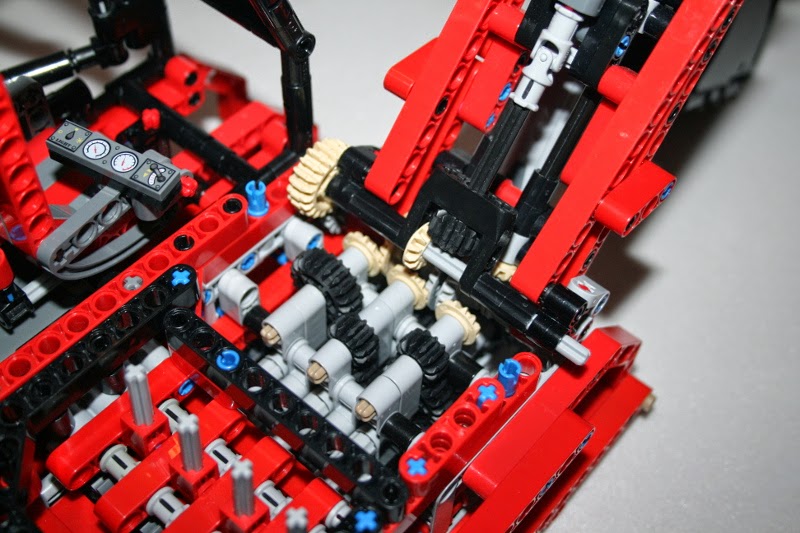
Tourelle :
Pour être honnête, la BV reprend le principe de ce MOC. Pour faire simple, on allume le moteur et la BV permet de changer le sens de rotation sur chaque fonction.
Du moteur L, il y a une réduction, avec un renvoi d'angle 12 / 20 T. Ensuite, sur le même axe, il y a 2 16 T : une entraîne une cascade de 4 16 T folles pour en entrée de la BV. La deuxième 16 T entraîne une 20 T puis une autre 20 T entraîne les 4 16 T folles côté sortie de la BV. Ainsi, suivant la position du levier, le sens de rotation de sortie est différent.
Levage du bras :
Levier de droite : En sortie de BV, on chemine du côté droit, jusqu'à l'avant de la tourelle. ensuite, 3 16 T ramènent le mouvement dans l'axe, puis on descend de trois tenons avec un couple 12 T / 20T. Finalement, on passe le mouvement au LA avec 12 T / 20 T folle / 12 T et LA.
Articulation du bras :
Levier de gauche : En sortie de BV, un couple 12 T / 20 T monte de 3 tenons. Ensuite un couple 12 T / 20 T en renvoi d'angle sur l'axe de rotation du bras. En passe le mouvement dans le bras à l'aide d'un couple 12 T / 20 T. Enfin un renvoi d'angle 12 T/ 12 T amène le mouvement au LA.
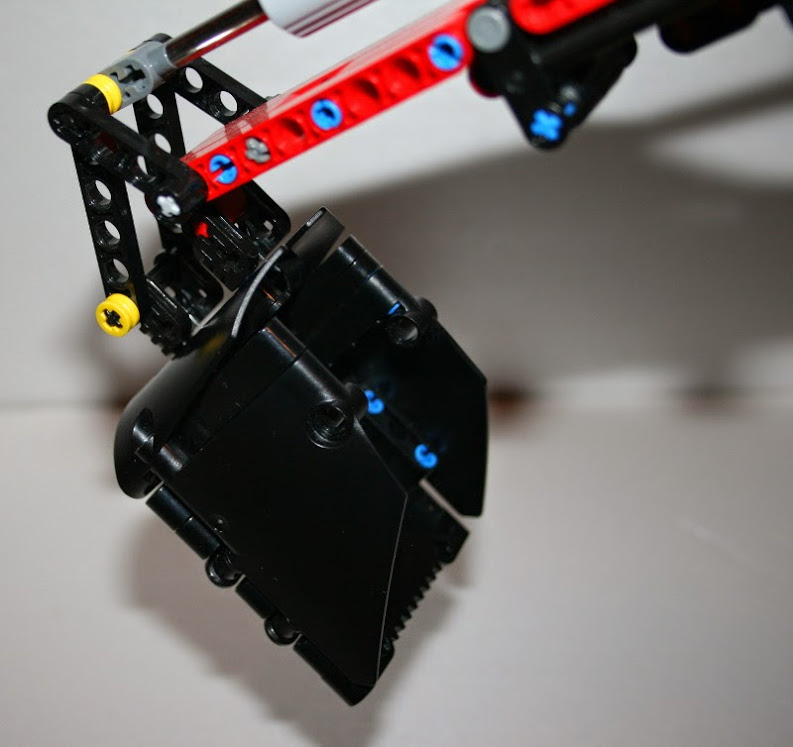
Allongement du bras / Godet :
Les 2 mécanismes sont semblables sur la majeure partie de leur cheminement. On utilise les 2 leviers du milieu. En sortie de BV, un couple 20 T / 12 T monte de 3 tenons le mouvement. Un système 12 T / 20 T folle / 12 T pour passer l'articulation et le mouvement est dans le bras. On décale d'un demi tenon avec 2 cardans puis avec 12 T / 20 T folle /12 T permet de passer la deuxième articulation du bras. Enfin un dernier renvoi d'angle 12 T / 12 T permet d'orienter le mouvement dans le bon plan.
Pour l'allongement du bras, cette dernière 12 T entraîne directement le LA, qui fait coulisser la dernière section du bras.
Pour le godet, le mouvement part vers l'arrière. Un couple 8 T / 8 T (rouge, sans frottement) permet de gérer le déplacement de l'axe induit par la translation du bras. Enfin on arrive sur le dernier LA et le godet est actionné.


Merci d'avoir tout lu.
La vidéo, en son direct, sans musique, sans trucage :
Donc, oui, ça cracouille un peu : soit je me plante de sens avec le levier et c'est le débrayage des vérins, soit c'est dans la chaîne cinématique (surtout avec le godet...)



 , un bijoux
, un bijoux 










.gif ":)")