



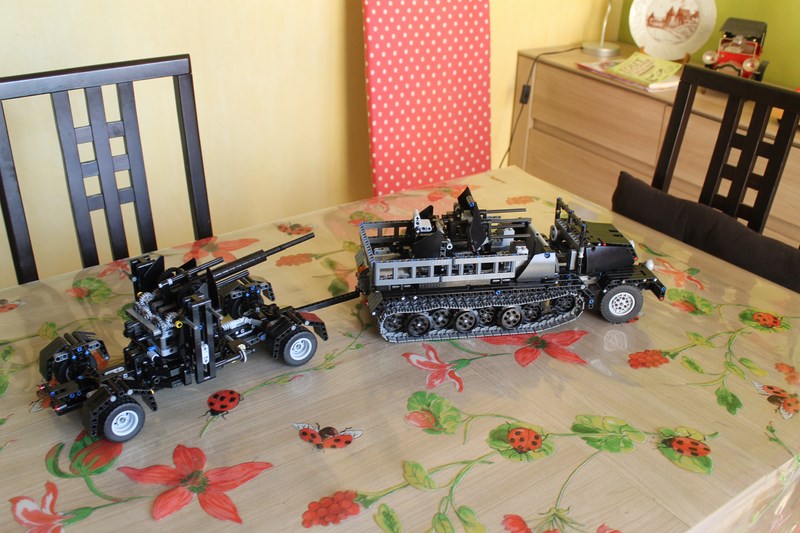
Voici donc la V2 très modifiée.




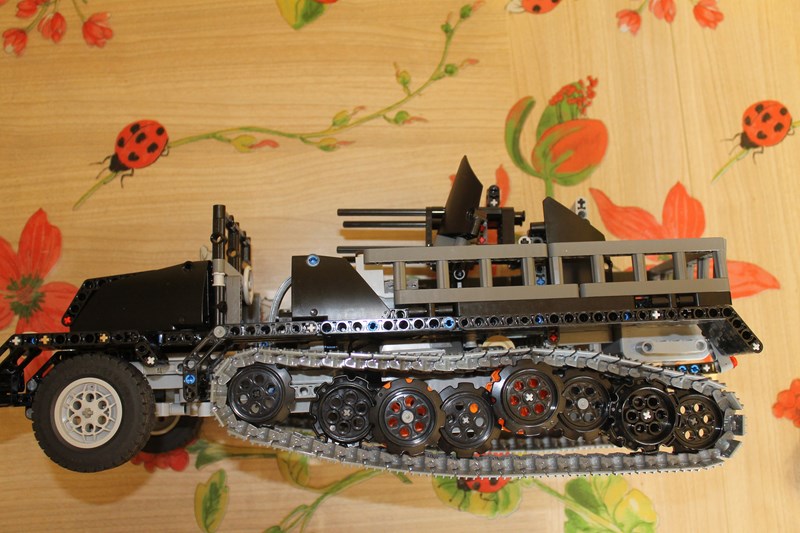
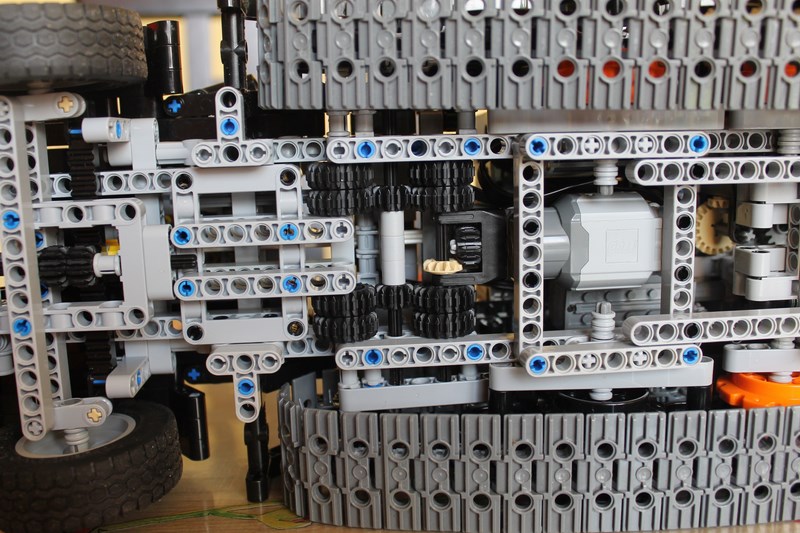
La propulsion est assurée par un moteur L, l'entrainement des chenilles est asservi à la direction, quand on tourne à droite seul la chenille gauche et entrainée, en ligne droite les deux chenilles sont entrainées et quand on tourne à gauche seul la chenille droite est entrainée.
J'ai choisi ce type de motorisation, car je ne voulais que deux commandes pour piloter le SDKFZ, une pour avancer et l'autre pour tourner, et ce système me permet de n'utiliser que deux moteurs un L pour la propulsion et un M pour la direction.
Les défauts de ce montage sont, une perte de motricité dans les virages, une seule chenille entrainée et la difficulté de faire passer le couple d'un moteur XL sans craquement d'où la présence pour le moment d'un moteur L.
Je compte explorer la base de données de Brickling pour trouver des roue mieux adapté pour remplacer une partie des barbotins.
La tourelle quadruple de 20 mm est actionné par deux moteurs M.
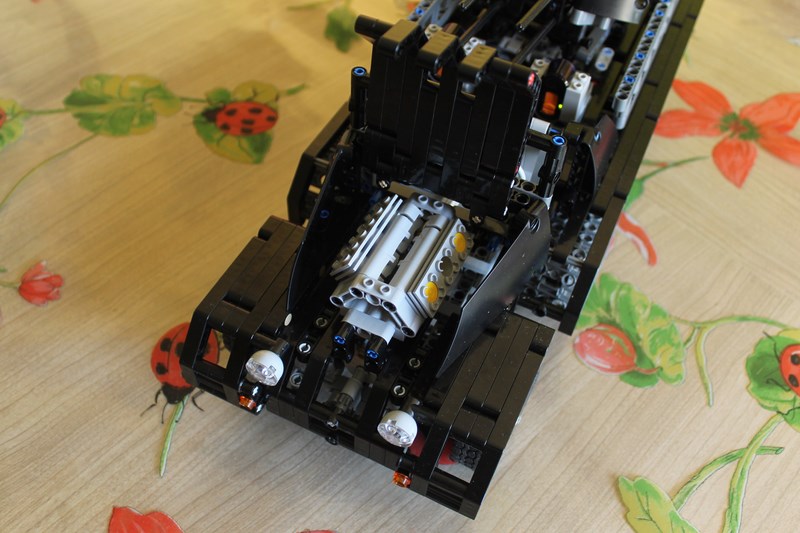
Un capot s'ouvre sur un V6 non entrainé pour le moment.
Le volant sera aussi à servir à la direction ultérieurement.
Les ridelles s'abaissent pour dégager la tourelle.
Le canon de 88 est en full manuel comme dans la réalité.



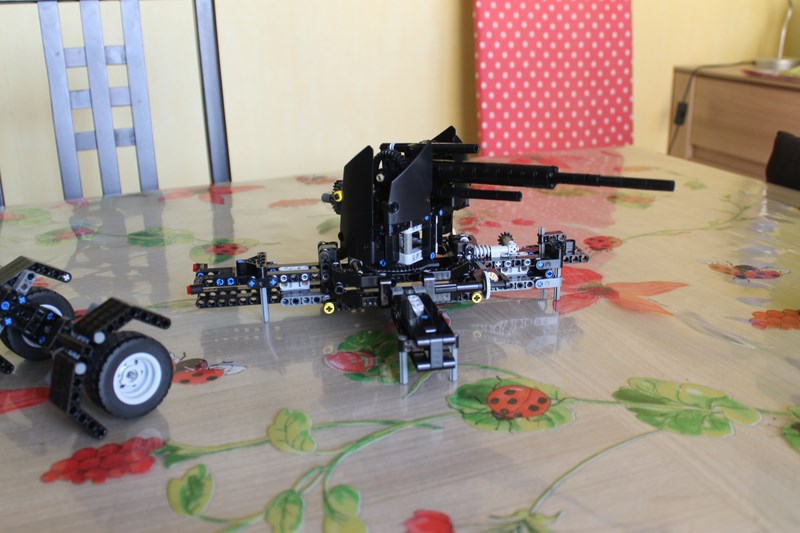

Les essieux peuvent être détachés du support.
Une molette assure le déploiement des stabilisateurs latéraux.
Deux autres molette assurent la rotation et l'elevation du canon.

Les modifications à venir sont, un meilleur positionnement de la molette de déploiement et l'ajout de quelques accessoires.
Les craquements que l'on entend sur la vidéo son dû en partie au barbotin.



.gif ":)")


.gif "8)")









