Le virus du MOC m'ayant repris depuis Fan de Briques 2013, me revoilà avec un projet que je n'avais jamais abordé (si il n'y avait que celui là....) : une grue.
Vous allez me dire "ouais, une grue, il y en a déjà des tas..."
Je vous répondrai que c'est un camion grue télescopique (avec possibilité de rajouter une flèche treillis) avec une seule cabine et seulement 2 essieux
Un sujet qui n'a jamais vraiment été abordé.
On peut dire que c'est le croisement entre un chargeur télescopique (Manitou) et un camion grue.
Du coup, je me suis dit que ce serait intéressant de bosser là dessus. Par contre, c'est un projet que j'ai décidé de partager de A à Z en mode Work In Progress car cela me permet de poser correctement les bases du modèle et vous montrer ce que je conçois, même les conceptions ratées en expliquant pour quoi j'ai choisis telle ou telle option.
Je suis bien entendu ouvert à toute suggestion.
Voici une photo :

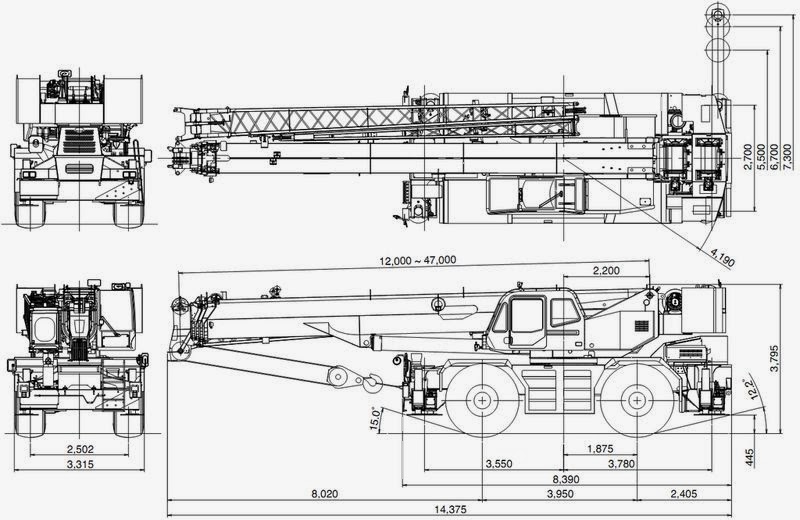
Tadano est une société japonaise qui s'est associée au groupe FAUN allemand pour produire leurs grues un peu particulière.
J'aime bien leur schéma de couleur : blanc (sans blague) et bleu.
La GR-800EX fait partie de leur série nommée "Rough Terrain Crane".
Elle et ses sœurs ont la capacité d'aller dans des endroits à l'accessibilité réduite là où des camions grue sont trop gros et les grues sur chenilles pas adapté, souvent en milieu urbain.
Ses capacités sont les suivantes :
- 4 roues motrices
- 4 roues directrices au choix :
- roues avant directrices
- roues arrières directrices
- toutes roues directrices
- mode crabe
- Se déplace sur route comme tout autre véhicule
- Châssis suspendu à lame et vérin
- Cabine unique
Ses capacités de grue :
- Tourelle rotative bien entendu
- Stabilisateur à déploiement en 2 temps (horizontal puis vertical comme la 42009)
- Flèche en 5 sections
- Forme de flèche en quart de rond dessous et droit dessus
- Une flèche treillis pliée en 2 en option attachée sur le côté droit de la flèche principale
- Un treuil principal à 2 mouflage
- Un treuil de manœuvre sans mouflage utilisable en bout de flèche principale ou en bout de flèche treillis
Voici ses dimensions réelles :
Définition du projet :
Je souhaite obtenir une grue répondant à chacun des critères suivants rangés par ordre d'importance :
- Jouable
- Simple et Solide
- Design proche de l'originale
- Fonctionnalités proches
- Tarif et rareté des pièces à acheter (oui, on oublie souvent ce point)
Le but du jeu et l'essence même de MOCer est de réussir à concilier chacun de ces éléments sans empiéter ou peu sur un autre de plus grande importance.
A mon sens, pour tout MOC à base de roue, c'est la taille des roues que nous choisissons qui définit la taille du MOC et tous les points qui en découlent.
Dans le cadre de cette grue, je choisis sans hésiter les roues de l'unimog car elles vont me permettre de MOCer plus aisément et de rendre le modèle plus attractif et m'attarder plus en détail sur son châssis et ses particularités de direction.
Je ne pense pas que ce soit trop gros car on est sur une grue qui est bien plus petite que la plupart des camions grues.
Dimensionnement :
- Longueur de flèche : 88 tenons soit 70 cm
- Épaisseur de flèche : 7 tenons
- Entraxe d'essieu : 28 tenons
- Longueur véhicule hors flèche : 59 tenons soit 47cm
- Longueur véhicule flèche au repos : 102 tenons soit 81.6cm
- Largeur véhicule : 23 tenons soit 18.4cm
- Largeur véhicule avec stabilisateur : 51 tenons soit 40.8cm
- Hauteur véhicule : 26 tenons soit 20.8cm
Choix de conceptions (évolutifs) :
PFS ou pas? Télécommandé ou pas? PFS partiel? PFS total? Un seul moteur par fonction?
Tant de questions mais la réponse doit être dictée par le besoin, l'objectif et les contraintes techniques.
Dans mon cas, le début de réponse est simple, je souhaite un modèle jouable, intuitif et surtout démonstratif car il est destinée à être exposé => PFS
Nombre maximum de fonctions motorisées :
- Propulsion
- Direction
- Sélection mode de direction
- Rotation grue
- Déploiement horizontal stabilisateur
- Déploiement vertical stabilisateur
- Levage flèche
- Déploiement flèche
- Treuil principal
- Treuil de manœuvre
Là, on voit que j'ai un léger soucis : 10 fonctions et je ne peux en avoir que 8 télécommandées au total, il va falloir trancher dans le vif.
Après analyse, il apparait que la partie du haut n'est pas vraiment modifiable, on est à 4 moteurs, la partie haute étant indépendante électriquement de la partie basse, inutile d'enlever un moteur.
C'est donc dans la partie basse qu'il faut virer des éléments télécommandés ; la logique veut que ce soit les stabilisateurs.
Quelle taille de flèche, nombre de sections, etc. :
Cette partie n'est pas encore totalement définie et le sera une fois que j'aurai fait tous les tests mais voici à quel stade j'en suis :
J'ai toujours voulu faire une flèche robuste capable de soulever une charge conséquente. Ma conception s'est portée sur ce point principalement.
Au départ j'étais parti sur une flèche d'une épaisseur de 9 tenons, ce qui fait grosso modo la taille d'une roue d'unimog. L'avantage, c'est qu'on pourrait faire une flèche à 5 sections mais faiblarde (la dernière section est trop petite) ou alors 4 sections solide.
Ça m'a semblé vraiment trop disproportionné dans le MOC, j'ai donc décidé de redescendre à 7 tenons et 3 sections
La dernière section fait 3 tenons ce qui est suffisamment costaud pour accueillir une flèche treillis en plus.
Avec cette solution on devrait obtenir une hauteur déployée conséquente d'environ 1m90 hors flèche treillis.
Cette flèche pourra se déployer et se rentrer quel que soit son inclinaison, j'ai donc choisi un déploiement par crémaillère plus adapté au double effet (par câble, ça doit être possible mais fait gérer 2 treuils simultanément et pas à la même vitesse... bref, galère et moins fiable).
J'ai choisi à priori un vérin à câble pour relever l'ensemble, c'est probablement la solution la plus viable pour soulever 70cm de flèche ; néantisation, je ferai un essai avec un vérin crémaillère car le point d'ancrage sur la flèche est assez éloigné.
Je n'ai pas encore défini ce que j'allais faire pour la flèche treillis car elle me pose des soucis techniques.
En effet, elle est constituée de 2 morceaux pliables qui de ce fait partent en pointe.

Avec ça, si vous avez des idées, je suis preneur.
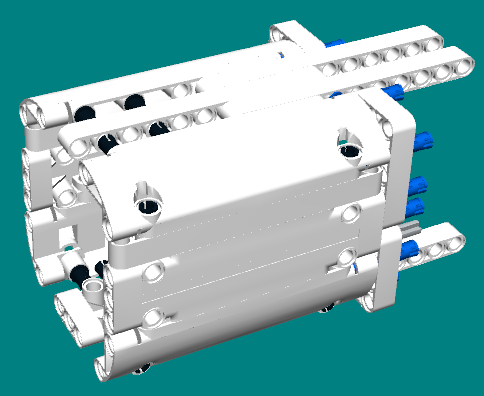
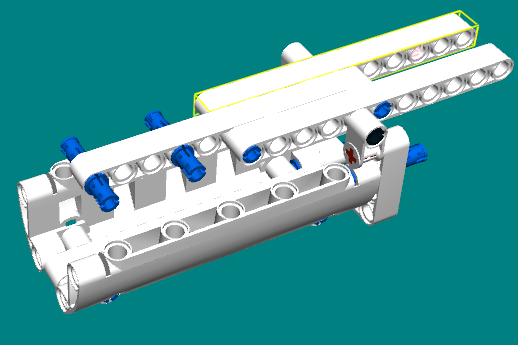
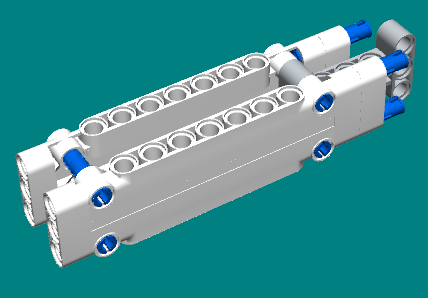
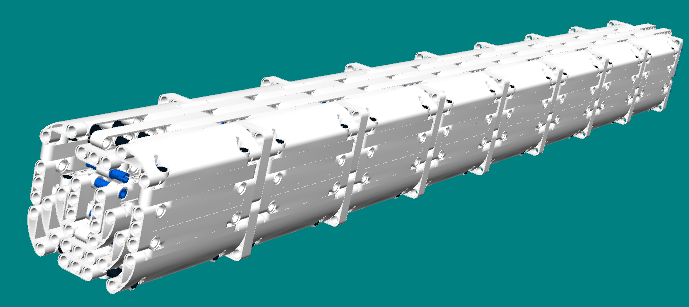
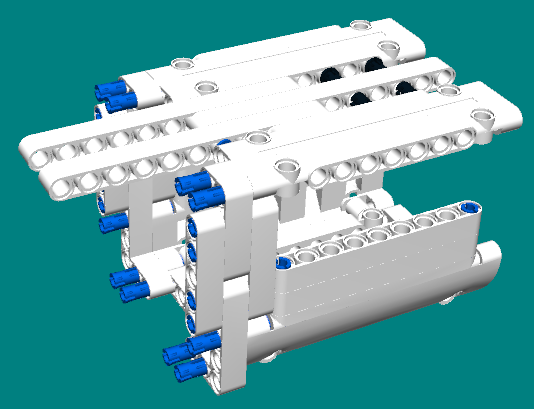
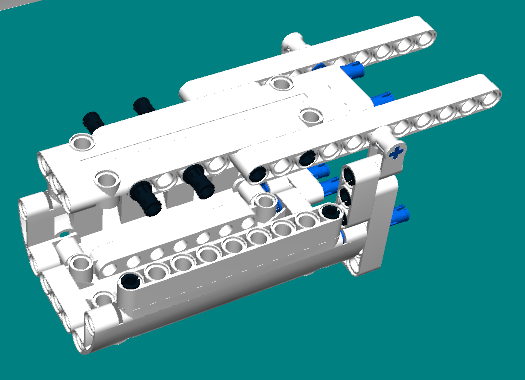
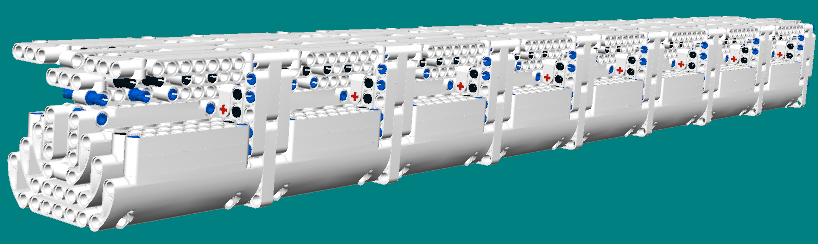
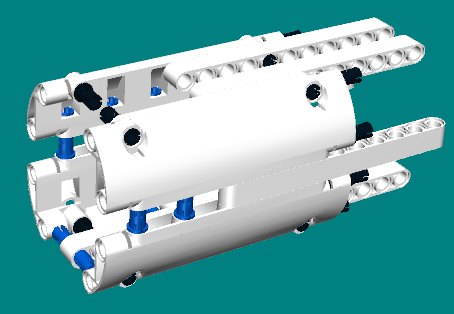
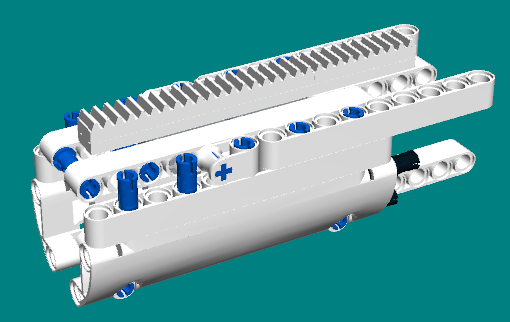
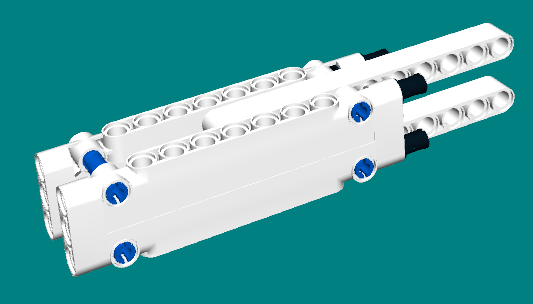
Pour en revenir à la structure de la flèche, sachez que la conception 3D est bien avancée et est passée par plein de versions suite à essai réel.
Je vous présenterai les différentes étapes en photo, je vous poserai une question esthétique à ce moment là.
Ça ira pour le pavé de ce soir.




 Il reste 4 fonctions (direction, propulsion et les deux mouvements des stabs) et un moteur (celui de la BV du changement de mode est pris). Alors si tu fais comme ça, je te conseille de mettre un moteur indépendant pour la propulsion et un autre pour la direction, et d'essayer de coupler les deux mouvements des stabs. Ce sera difficile mais je suis sûr que c'est possible, soit en faisant en sorte qu'au départ les deux mouvements soient sur le même axe et le mouvement horizontal force plus que celui vertical, puis faire un débrayage quand le mouvement horizontal arrive en bout de course pour que le mouvement vertical soit activé. Après, 'faut voir pour le sens inverse...
Il reste 4 fonctions (direction, propulsion et les deux mouvements des stabs) et un moteur (celui de la BV du changement de mode est pris). Alors si tu fais comme ça, je te conseille de mettre un moteur indépendant pour la propulsion et un autre pour la direction, et d'essayer de coupler les deux mouvements des stabs. Ce sera difficile mais je suis sûr que c'est possible, soit en faisant en sorte qu'au départ les deux mouvements soient sur le même axe et le mouvement horizontal force plus que celui vertical, puis faire un débrayage quand le mouvement horizontal arrive en bout de course pour que le mouvement vertical soit activé. Après, 'faut voir pour le sens inverse...












 Micromoteur activable par un swich dans le porteur ?)
Micromoteur activable par un swich dans le porteur ?)