




Le 6 juillet 2011, en joie devant mon pc, j’aperçois le nouveau sujet du concours, attendu par tous depuis un long moment je suppose ( par moi en tout cas^^). Tout content du nouveau sujet qui sortait un peu de l'ordinaire et qui, je dois bien l'avouer, n'aurais pas été un choix de MOC dans l'immédiat ( j'ai tellement de projets en tête...) je me lance dans des recherches internet, comme à mon habitude avant de commencer un projet, pour déterminer ce que j'allais réalisé.
Ma première démarche fut de taper "garbage truck" sur youtube et de regarder cette vidéo. Pour ceux qui ne l'auraient jamais vue, la voici :
Rapidement, je suis tombé amoureux de la cinématique de chargement des garbage truck side loader ou camion poubelle à chargement latéral en français. Si rares dans nos régions européennes, ils sont fréquemment utilisés sur le continent américain et sortir un peu de l'ordinaire me plaisait bien. J'ai poursuivi mes recherches et suis alors tombé sur le site d'une compagnie fabriquant ces fameux bras :
Heil : http://www.heil.com/ProductInfo.aspx?ProductId=30
Grâce au site de cette compagnie, j'ai pu comprendre exactement comment fonctionnait la cinématique du bras et choisir ainsi un type de bras qui serait réalisable en lego en combinant avantageusement débattement, solidité, beauté et puissance ( le durapack python, en l’occurrence).
Il me restait à trouver le camion sur lequel le monter et, comme beaucoup des photos des fichiers pdf de heil présentent des camions mack, j'ai décidé de réaliser un mack TerraPro™ Low Entry :
http://www.mackterrapro.com/
Et voilà à quoi ça ressemble pour ceux qui, comme moi auparavant, n'en ont jamais vu :


Ainsi donc, j'avais mon projet, restait à savoir comment le réaliser. Le pneumatique s'est imposé comme une évidence, pour combiner toutes ces fonctions. Au départ, un compresseur me semblait une bonne idée. Idée vite abandonné vu la pression nécessaire pour soulever la poubelle (50g non chargée tout de même...) et le faible bras de levier, nécessaire pour avoir une course suffisante. Tant pis, une pompe manuelle remplirait ce rôle et puis, un MOC tout manuel, ça changeait un peu de mes habitudes ( d'autant plus avec du pneumatique). Mon projet est né et, après une semaine de travail intensif ( merci les vacances), je le finissais. Ne me restait plus qu'à attendre la commande bulklug pour finaliser le câblage. Je comptais également profiter du câblage pour effectuer certaines modifications, conseillées par un membre de ce forum (je ne sais pas s'il préfère garder l'intimité ou non...). Malheureusement, la commande bulklug est arrivée tard et le manque de temps à ce moment, ainsi que les semaines précédant l'arrivée du colis m'ont empêché de toucher à quoi que ce soit.
D'ailleurs, c'est de justesse que j'ai réussi à finaliser le câblage, prendre les photos et la vidéo. Mais heureusement, aujourd'hui, je peux tout de même vous le présenter ! Après ce long blabla, il est temps pour la :
REVIEW !
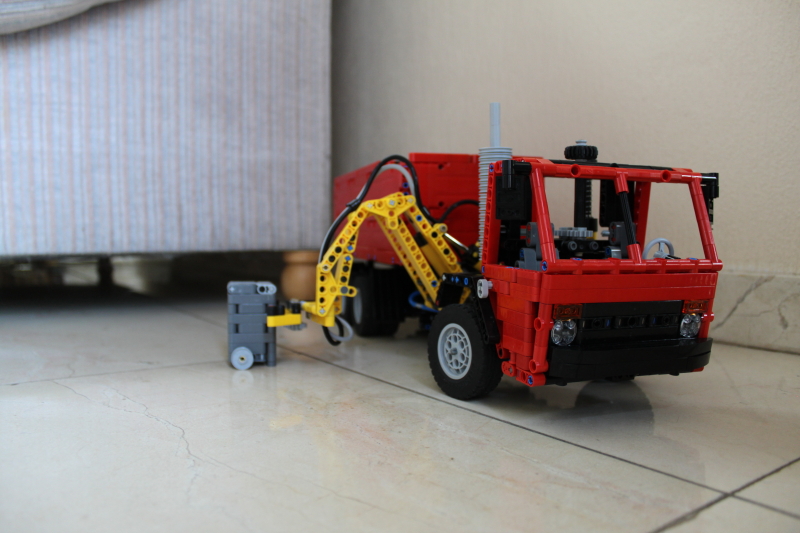
Une fois n'est pas coutume, commençons par deux-trois photos :


Deux choses en particulier ont été compliquées à réaliser : la cinématique du bras( j'y reviendrai) et la forme de la cabine. En effet, les formes de la cabine sont tout sauf à angle droit, et les angles et les lego, ça fait deux^^. Il me fallait donc une structure à angle droit, sur laquelle je pourrais greffer des poutres pour donner cette forme bien particulière au mack terraprow low entry. Cette structure, je l'ai choisie de couleur noir pour qu'elle soit le moins visible possible et au final, je trouve le résultat optimal ( pour peu qu'on n'y prête guère d'attention on croirait presque que seule les poutres rouges composent la cabine- je sais j'exagère un peu là
 ).
). 
Naturellement, les portes s'ouvrent. Pas de volant factice, c'était impossible pour rester esthétique ( suffit de voir où est positionné le volant...)

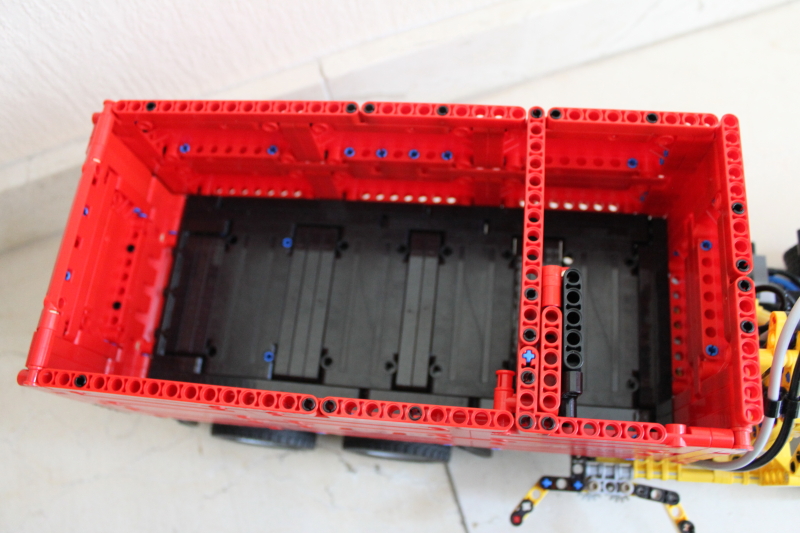
La couleur rouge s'est imposée pour les panels composant la benne. Dommage, le rouge n'est pas la couleur que j'ai le plus et certaines concessions ont dû être faites, surtout au niveau de la cabine.
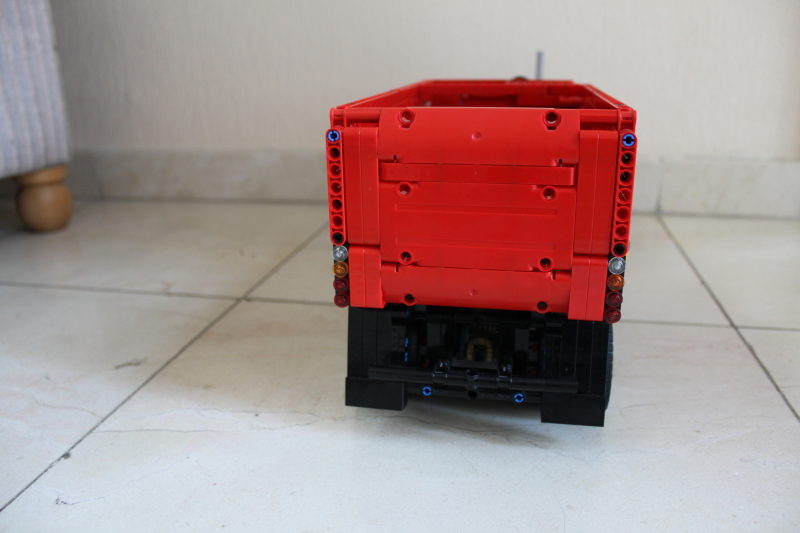
Pour le reste des détails esthétiques, je suis particulièrement content des garde-boues et de l'arrière. L'espace entre la cabine et le bras a été voulu, pour me rapprocher de ce qui se fait sur les vrais camions.

Maintenant, passons à ce qui nous intéresse vraiment : les fonctions !
A savoir :
-Moteur factice (L4) sous la cabine, entraînée par les deux essieux arrières avec ( 28T-20T/20T-12T), il mouline donc bien !
-Direction sur l'essieu avant avec pour réductions 12T/20T et 12T sur crémaillère. Particularité de la direction? Les pignons se connectent à angle plat quand la cabine est posée sur le châssis.
-Mouvement du bras ( avance/recule) pour venir chercher les poubelles sur le trottoir
-Fermeture/ouverture de la pince pour attraper les poubelles
-Levée du bras pour décharger le chargement dans la benne
-Compresseur ( pour amener les déchets dans la seconde partie de la benne- et les compresser par la même occasion)
-Levée de la benne avec compas de levage pour avoir un débattement suffisant
Voici une vue qui vous permet de voir le moteur factice ainsi que le trajet de la direction.



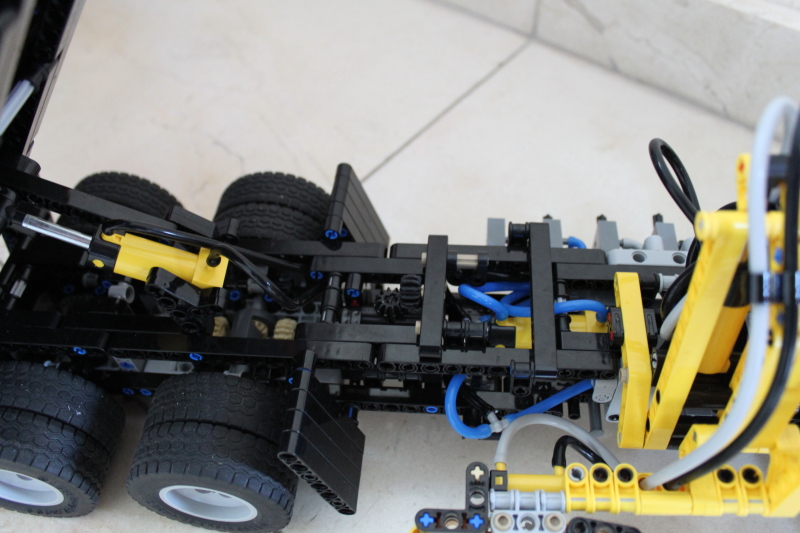
Sur cette photo, vous pouvez voir le fonctionnement du compas de levage ( basique), ainsi que le compresseur. Ces deux fonctions sont assurées par des anciens vérins pneumatiques car je n'ai pas eu le temps de les remplacer par les nouveaux reçus par le bulklug. M'enfin,les deux vérins font la même chose et de toute façon on ne les voit que très peu
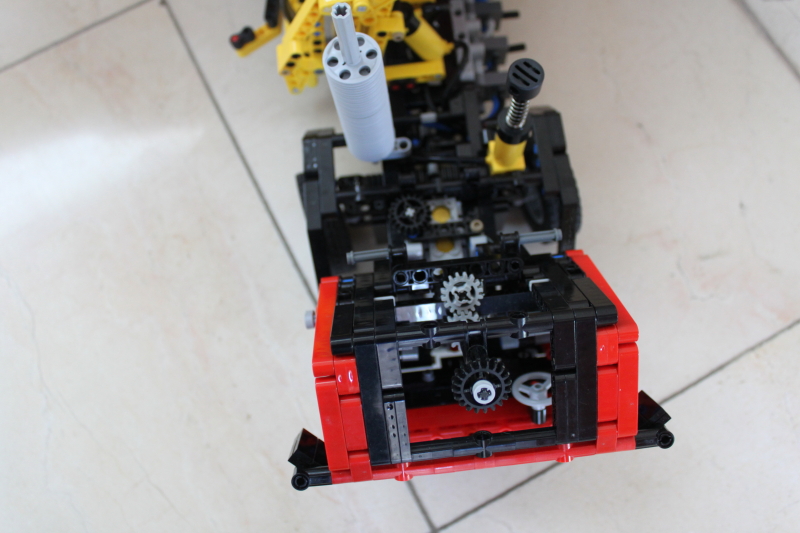
Une petite explication sur le compresseur : le vérin pousse ou tire une crémaillère qui actionne une 12T. Sur l'axe de cette 12T se trouve une autre 12T qui s'engrène encore avec une autre 12T (à la verticale). Ainsi, quand la benne est posée, la 12T qui actionne le compresseur est en contact avec la 12T verticale et le mouvement peut se faire. Lorsque la benne est levée, pas moins de compacter donc. Deux photos du compacteur en action :
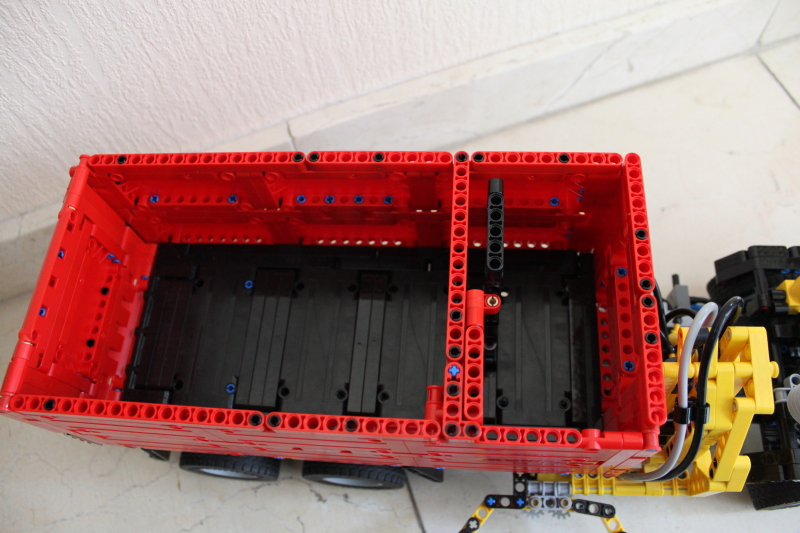
Je tiens à préciser que les compacteurs fonctionnent de cette manière sur les vraies benne des camions poubelles à chargement latéral.
Attaquons maintenant ce qui fût le plus intéressant à construire : le bras. Et avant toute explication quant à sa création, je vous propose une série de photos pour voir la cinématique de celui-ci : (en spoiler pour alléger le poste)
Cinématique du bras







Comme je le disais, ce fut la partie la plus intéressante mais aussi la plus compliquée à construire. J'ai en effet dû m'y reprendre à plusieurs fois pour avoir un débattement convenable des différents mouvements du bras, mais aussi réussir à ce que ces mouvements se fassent sans aucune interférence. Après, il a fallu trouver la longueur du bras de levier pour combiner force et débattement. En effet, sur les vrais, les vérins utilisés sont bien plus longs, mais en lego, aucun long vérin pneumatique n’existe. Ainsi, au début, le vérin était incapable de lever la poubelle de 50g ( bras de levier trop faible et poubelle située loin du point de pivot...). Après quelques essais, j'ai finalement réussi à combiner les deux mais il faut pomper pas mal et le moteur M actionnant le compresseur ne délivrait pas une pression suffisante, d'où la nécessité d'oublier cette option. Deux caoutchous permettent à la pince de tenir correctement la poubelle ( sans quoi celle-ci glisserait car le vérin pneumatique n'a pas la force nécessaire pour retenir à lui seul la poubelle). En fait, quand on regarde ce bras, il semble vraiment tout simple mais je peux vous garantir que derrière ce cache quelques heures de travail ! Mais quel résultat
 Je ne compte plus le nombre de fois que j'ai déchargé ma poubelle dans la benne
Je ne compte plus le nombre de fois que j'ai déchargé ma poubelle dans la benne 

Voici une photo des cinq sélecteurs actionnant toutes les fonctions pneumatiques. Dans l'ordre et de gauche à droite on a : déplacement du bras/montée du bras/pince/compacteur/benne. Câbler tout à la fin n'est pas la meilleure chose à faire mais au final, ce fut plus facile que ce à quoi je m'attendais.



En conclusion, je suis vraiment très content de ce MOC, qui me satisfait à tout point de vue, et je peux vous dire que j'ai appris à apprécier le pneumatique avec ce camion poubelle. Rien que pour ça, je tiens à remercier Anio pour ce concours. Finalement, voici ma galerie brickshelf pour d'autres photos :
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=485082
Et la vidéo :
Je tiens à préciser qu'il faut un peu d'entrainement pour faire faire ce qu'on veut avec le bras ( ordre des mouvements, ne pas s’emmêler les pinceaux,...)
Merci à tous ceux qui m'auront lu jusqu'au bout, car ce fut un long post ( mais très plaisant à écrire) et félicitations à tous les participants !



.gif ";)")

 ? .
? ..gif ":)") )
)




 )
)