






Le modèle est extensible à plusieurs commande l'une à coté de l'autre en mettant en contact toutes les roues folles.
Le procédé à été inventé par Erik leppen sur une de ces grues :
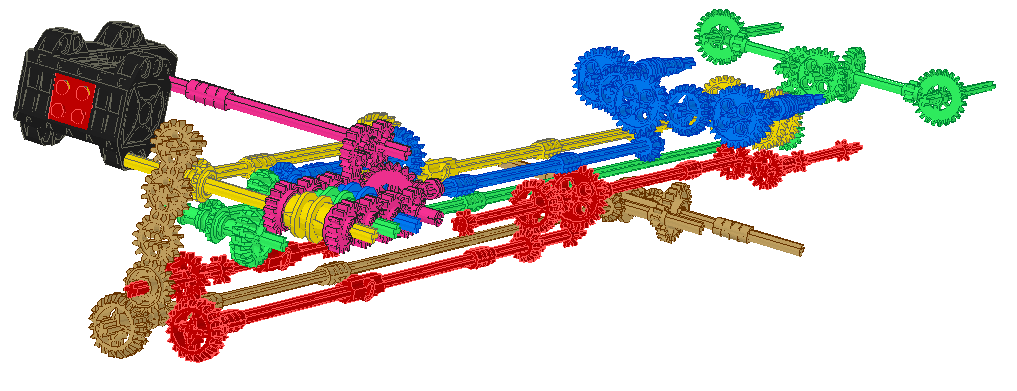
Chaque couleur représente une fonction, l'inversion des sens de rotation et fait grâce à une roue denté de 24 dents. (en violet). Cette roue est moteur.
Le procédé est réutilisé par exemple sur le truck bleu de clement pour commander plusieurs fonctions avec inversion du sens de rotation: :

http://www.brickshelf.com/cgi-bin/gallery.cgi?f=278708
Ce modèle est très pratique lorsque l'on veut contrôler plusieurs fonctions et ne nécessite pas un inverseur de polarité électrique par fonction. C'est aussi pratique pour des systèmes qui ne disposent que d'un sens de rotation en entré.
Par exemple pour un projet en cours, mes 3 moteurs utilisés ne peuvent tourner que dans un sens et ne peuvent changer de sens de rotation en fonctionnement, donc c'est très pratique pour contrôler les fonctions finales du MOC.
A noter que mon premier essais pour faire une boite d'inversion était de rendre moteur non pas les roues folles mais l'axe du driving ring, l'inversion du système se situait après les roues folles mais nécessitait beaucoup d'engrenage. Le modèle de erik leppen tient dans 1 tenons de haut.
.gif)
Je posterais bientot une version du montage en studless
.gif)





 ).
).







 et désolé pour le post inutile
et désolé pour le post inutile 
